#include <Polygon.h>
Classes | |
| struct | Index |
Public Types | |
| using | base = container::Vector<PolyPoint> |
| Base storage class for Polygon. | |
| using | Unique = std::unique_ptr<Polygon> |
| Unique pointer. | |
| using | Shared = std::shared_ptr<Polygon> |
| Shared pointer. | |
| using | Option = std::optional<Polygon> |
| Optional. | |
 Public Types inherited from active::container::Vector< PolyPoint > Public Types inherited from active::container::Vector< PolyPoint > | |
| using | base |
| Base container type. | |
| using | value_type |
| Stored type. | |
| using | size_type |
| Container size (index) type. | |
| using | iterator |
| Container iterator type. | |
| using | const_iterator |
| Container const iterator type. | |
Public Member Functions | |
| Polygon (vertex_index size=defSize, part_index holeSize=0, bool isClosed=true) | |
| Polygon (const std::initializer_list< PolyPoint > &points, bool isClosed=true) | |
| Polygon (const Box &source, double angle=0.0) | |
| Polygon (const Polygon &source) | |
| Polygon (Polygon &&source) noexcept | |
| virtual | ~Polygon ()=default |
| virtual Polygon * | clonePtr () const |
| virtual Polygon * | movePtr () |
| virtual Polygon::Unique | cloneGeometry () const |
| virtual Polygon & | operator= (const Polygon &source) |
| virtual Polygon & | operator= (Polygon &&source) noexcept |
| PolyPoint * | operator[] (vertex_index index) |
| const PolyPoint * | operator[] (vertex_index index) const |
| Polygon | operator+ (const Point &offset) const |
| Polygon & | operator+= (const Point &offset) |
| Polygon | operator- (const Point &offset) const |
| Polygon & | operator-= (const Point &offset) |
| Polygon | operator* (const double &mult) const |
| Polygon & | operator*= (const double &mult) |
| Polygon | operator* (const Matrix3x3 &mult) const |
| Polygon & | operator*= (const Matrix3x3 &mult) |
| Polygon | operator* (const Matrix4x4 &mult) const |
| Polygon & | operator*= (const Matrix4x4 &mult) |
| Polygon | operator/ (const double &mult) const |
| Polygon & | operator/= (const double &mult) |
| virtual bool | isValid (bool doIntersect=false, double prec=math::eps) const |
| bool | isEqual2D (const Polygon &ref, double prec=math::eps) const |
| bool | isEqual3D (const Polygon &ref, double prec=math::eps) const |
| vertex_index | vertSize (bool isOuter=true) const |
| vertex_index | edgeSize () const |
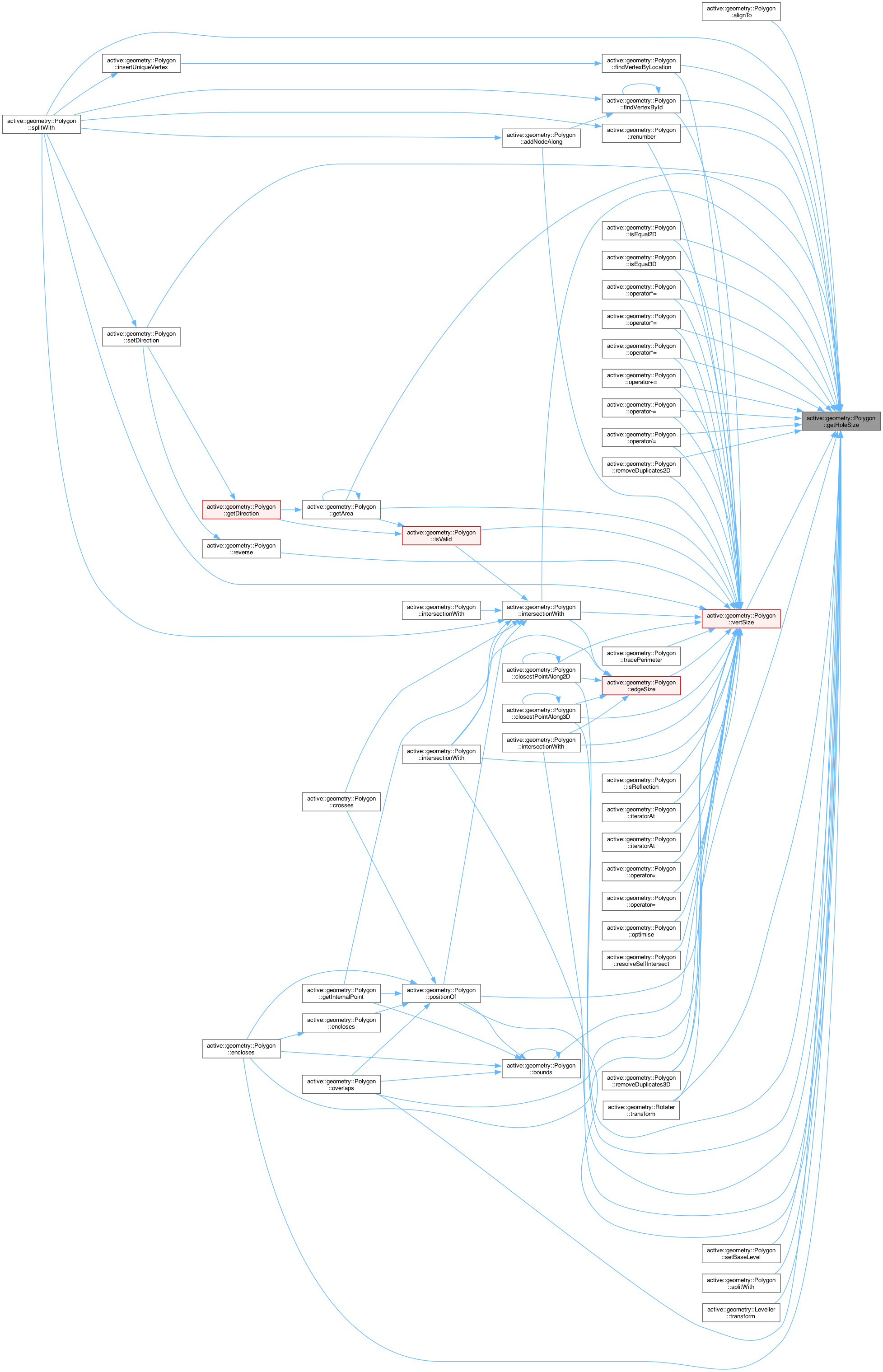
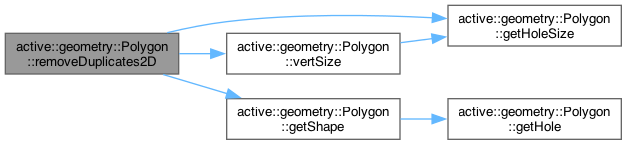
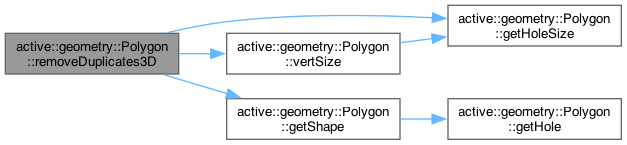
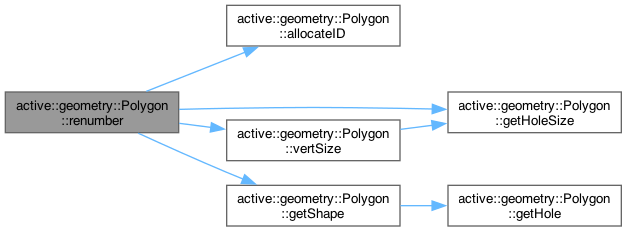
| part_index | getHoleSize () const |
| vertex_id | getTopID () const |
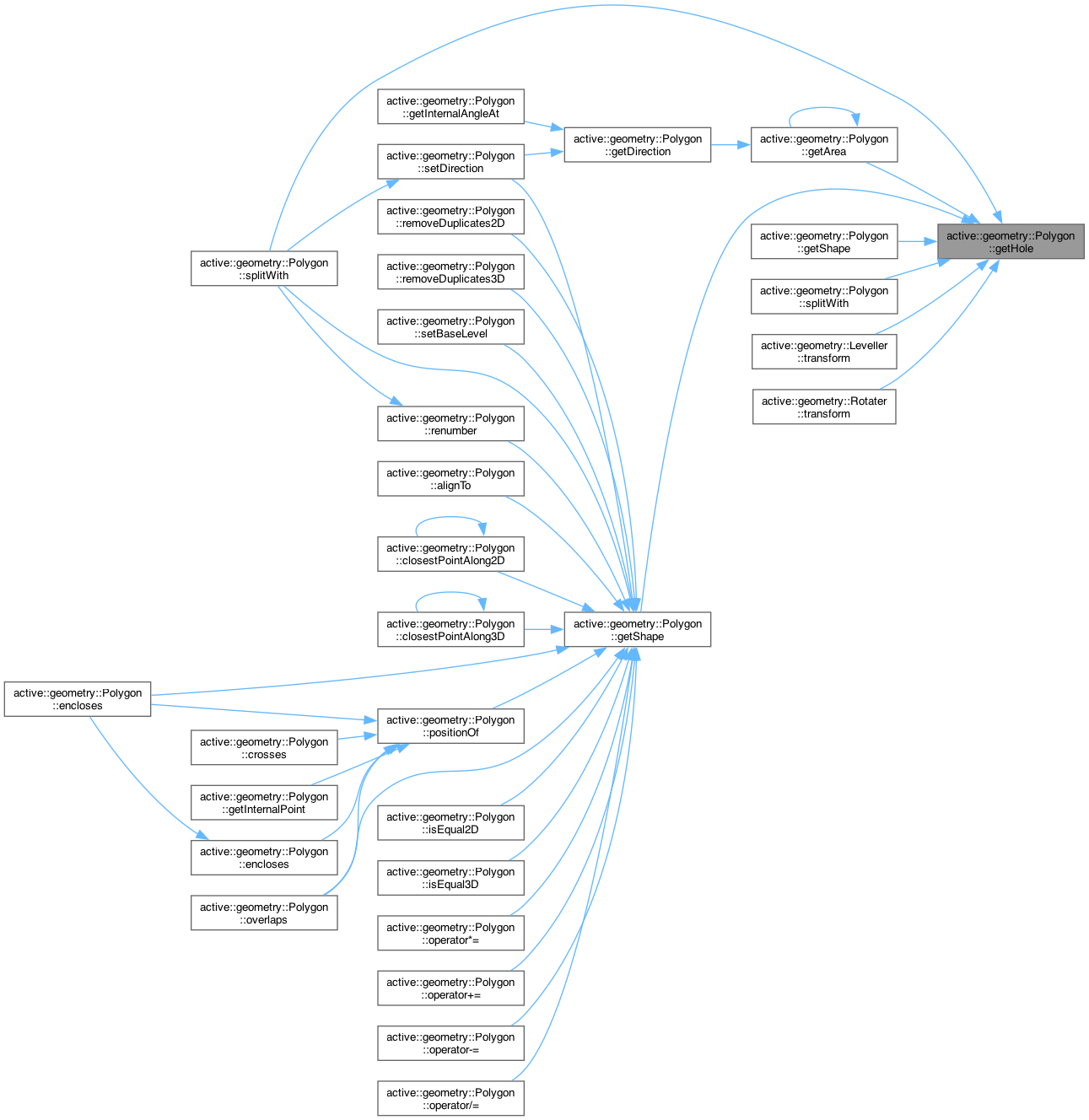
| Polygon * | getHole (part_index which) const |
| PolyVector * | getHoles () const |
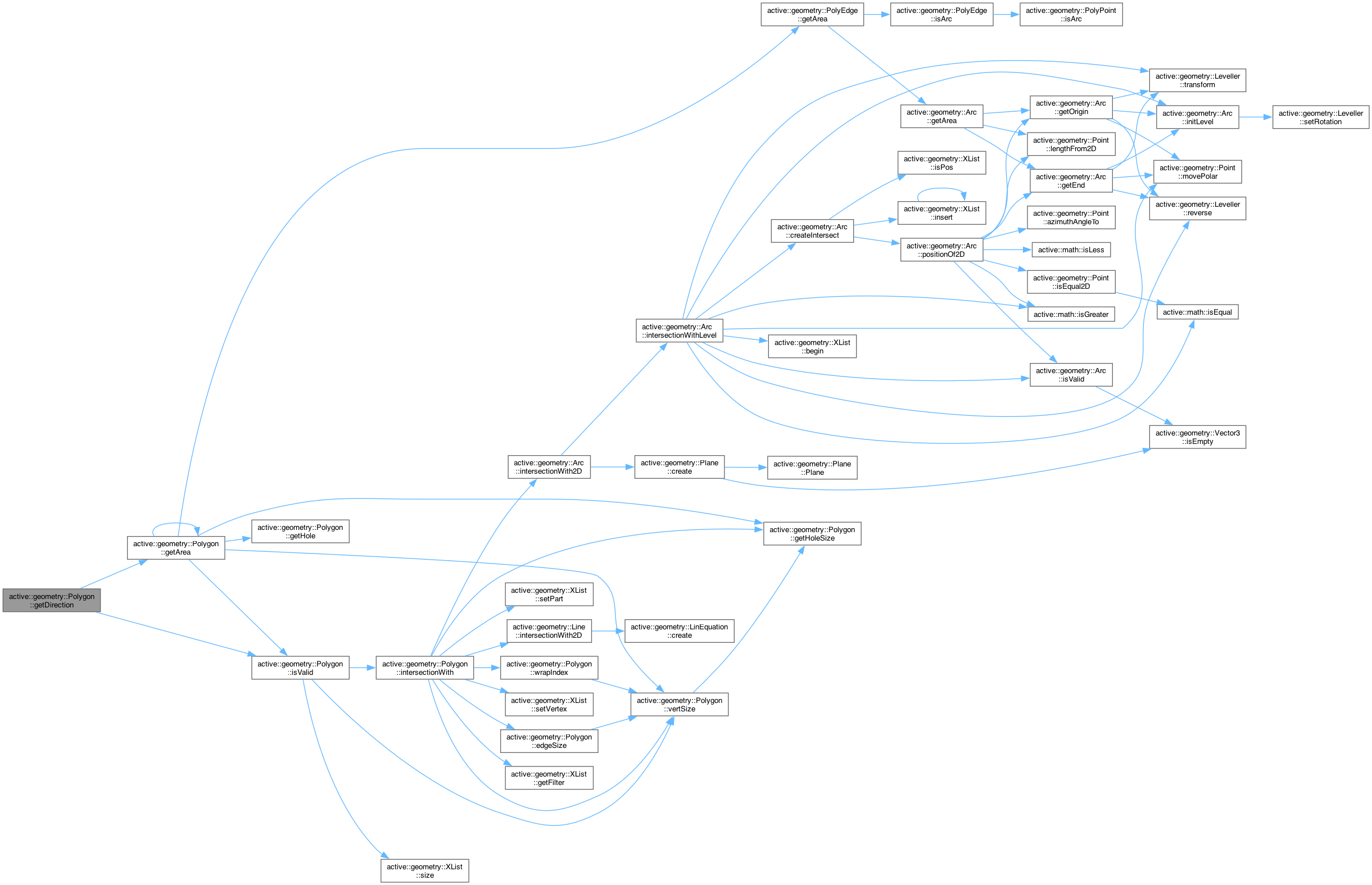
| std::optional< Rotation > | getDirection () const |
| Box::Option | bounds () const |
| double | getPerimeter2D () const |
| double | getPerimeter3D () const |
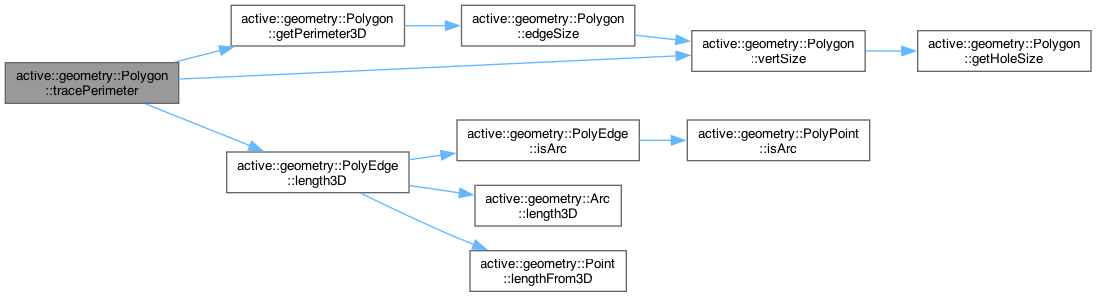
| vertex_index | tracePerimeter (double len, PolyPoint &endPos) const |
| double | getArea (bool isNet=true, bool isResultSigned=false) const |
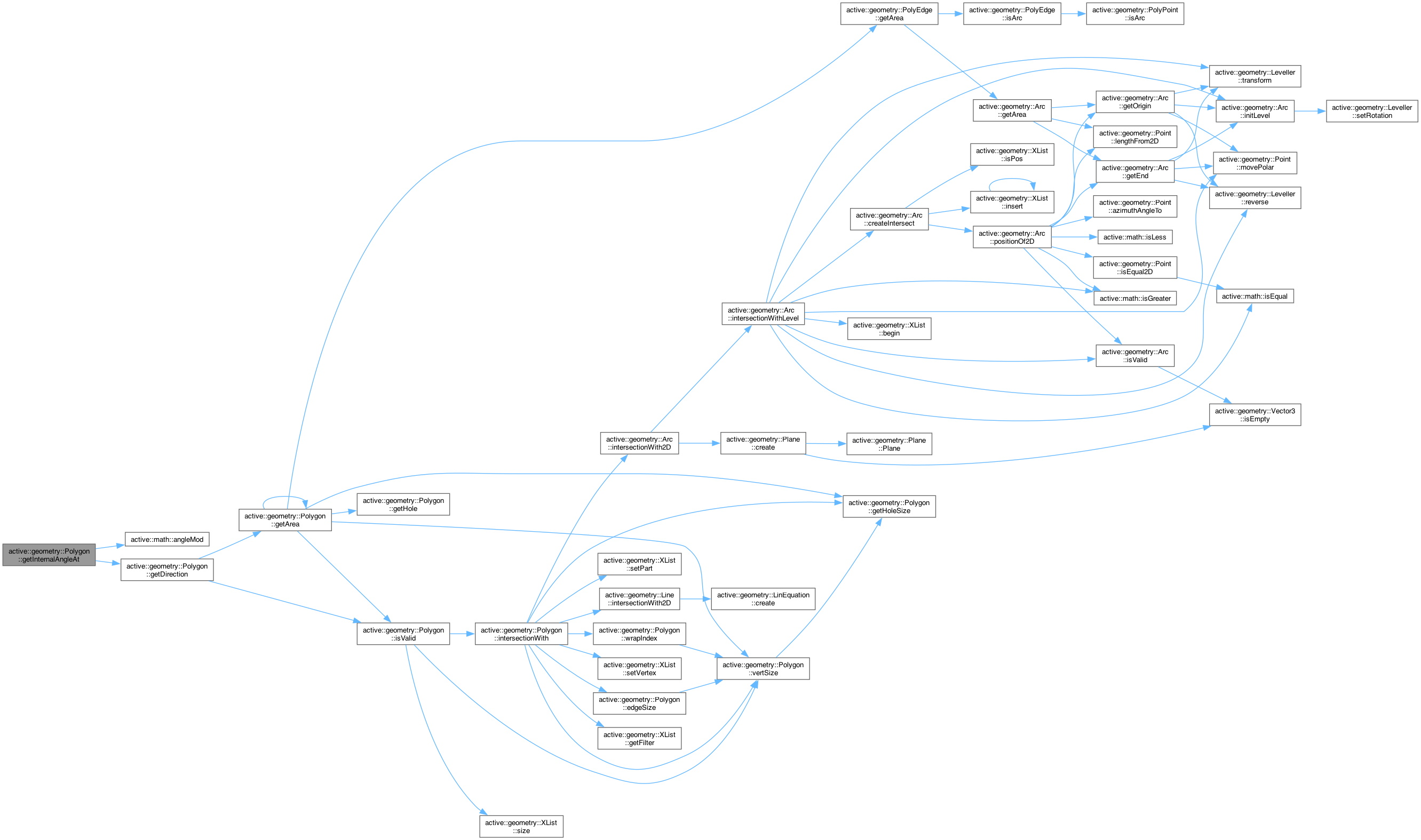
| double | getInternalAngleAt (vertex_index index) const |
| bool | isTangentialAt (vertex_index vertex, double anglePrec=math::epsAngle) const |
| bool | isReflection (vertex_index index, const LinEquation &ref, double prec=math::eps) const |
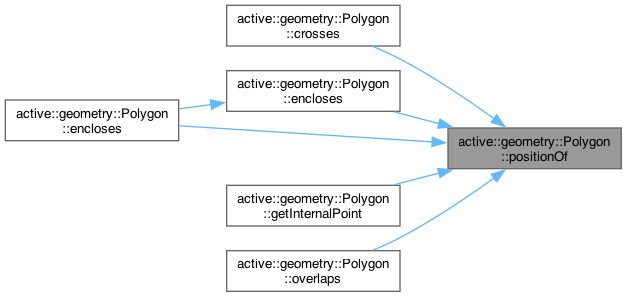
| Point::Option | getInternalPoint () const |
| std::optional< Index > | findVertexById (vertex_id ID) const |
| std::optional< Index > | findVertexByLocation (const Point &pt, double prec=math::eps) const |
| const Polygon & | getShape (part_index index) const |
| Polygon & | getShape (part_index index) |
| base::iterator | iteratorAt (vertex_index index) |
| base::const_iterator | iteratorAt (vertex_index index) const |
| vertex_index | wrapIndex (vertex_index index) const |
| XPoint | closestPointAlong3D (const Point &ref, bool withHoles, double prec=math::eps) const |
| XPoint | closestPointAlong2D (const Point &ref, bool withHoles, double prec=math::eps) const |
| Position | positionOf (const Point &ref, double prec=math::eps) const |
| vertex_index | intersectionWith (const Line &ref, XList &inter, double prec=math::eps) const |
| vertex_index | intersectionWith (const Arc &ref, XList &inter, double prec=math::eps) const |
| vertex_index | intersectionWith (const PolyEdge &ref, XList &inter, double prec=math::eps) const |
| vertex_index | intersectionWith (const Polygon &ref, XList &inter, double prec=math::eps) const |
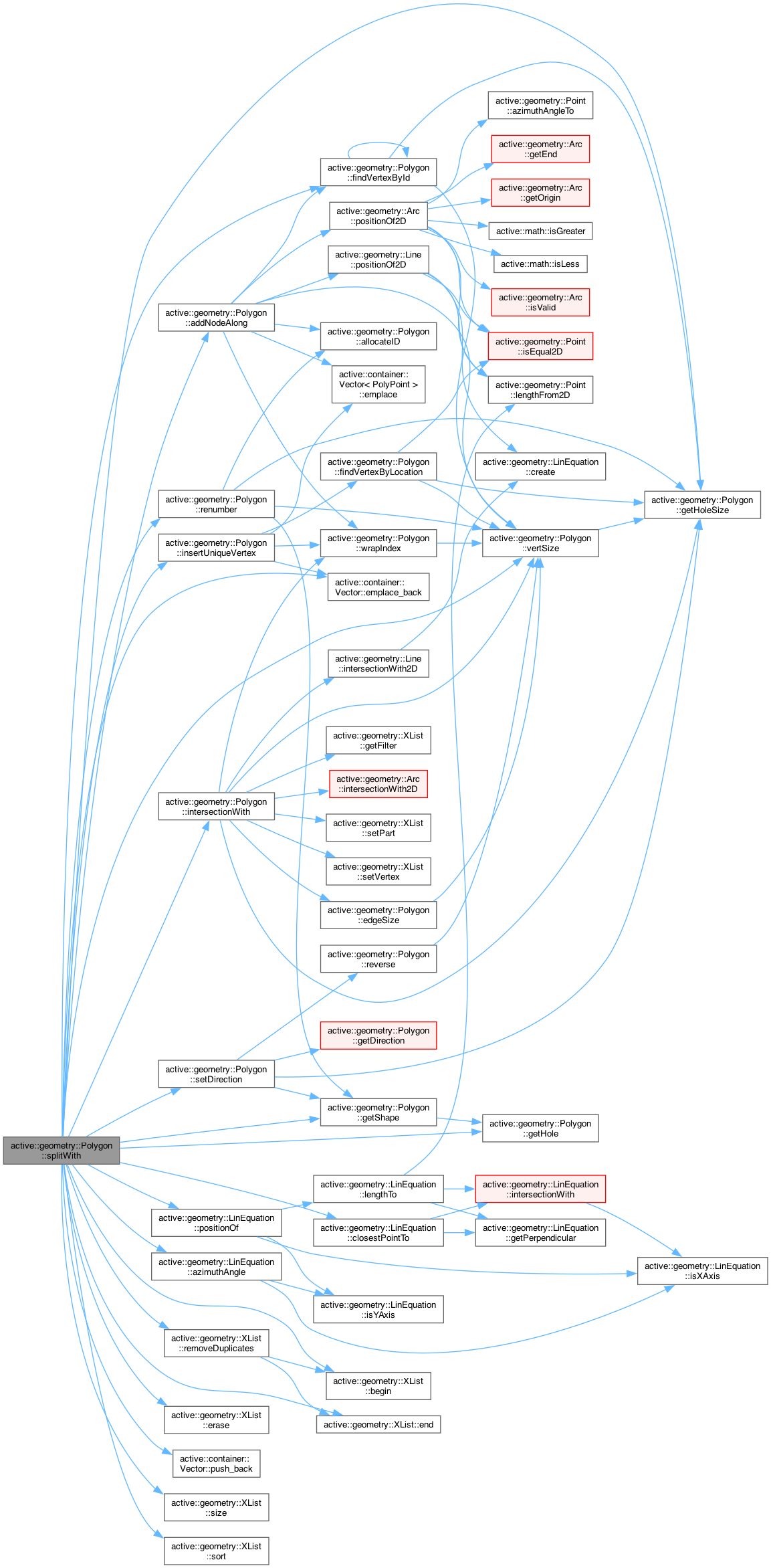
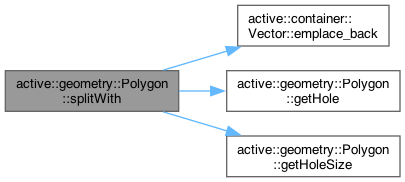
| void | splitWith (const LinEquation &ref, PolyVector *polyRight=nullptr, PolyVector *polyLeft=nullptr, double prec=math::eps) const |
| void | splitWith (const Polygon &ref, PolyVector *polyIn=nullptr, PolyVector *polyOut=nullptr, double prec=math::eps) const |
| part_index | resolveSelfIntersect (PolyVector &resolved, double prec=math::eps) const |
| bool | crosses (const Line &ref, double prec=math::eps) const |
| bool | encloses (const Point &ref, double prec=math::eps) const |
| bool | encloses (const Polygon &ref, double prec=math::eps) const |
| bool | overlaps (const Polygon &ref, double prec=math::eps) const |
| vertex_id | allocateID () |
| void | setTopID (vertex_id topId) |
| void | clear (bool allVertices=true, bool allHoles=true) |
| Polygon * | insertHole (const Polygon &hole) |
| Polygon * | insertHole (Polygon *hole=nullptr) |
| Polygon * | emplaceHole (Polygon::Unique &&hole) |
| Polygon * | emplaceHole (Polygon &&hole) |
| void | setHoles (std::unique_ptr< PolyVector > &&holes=nullptr) |
| void | setHoles (PolyVector &&hole) |
| void | removeHole (part_index which) |
| Polygon::Unique | releaseHole (part_index which) |
| vertex_id | addNodeAlong (vertex_id ID, const Point &pos, double prec=math::eps) |
| virtual bool | insertUniqueVertex (PolyPoint &&pt, vertOption where=std::nullopt) |
| std::unique_ptr< PolyVector > | releaseHoles () |
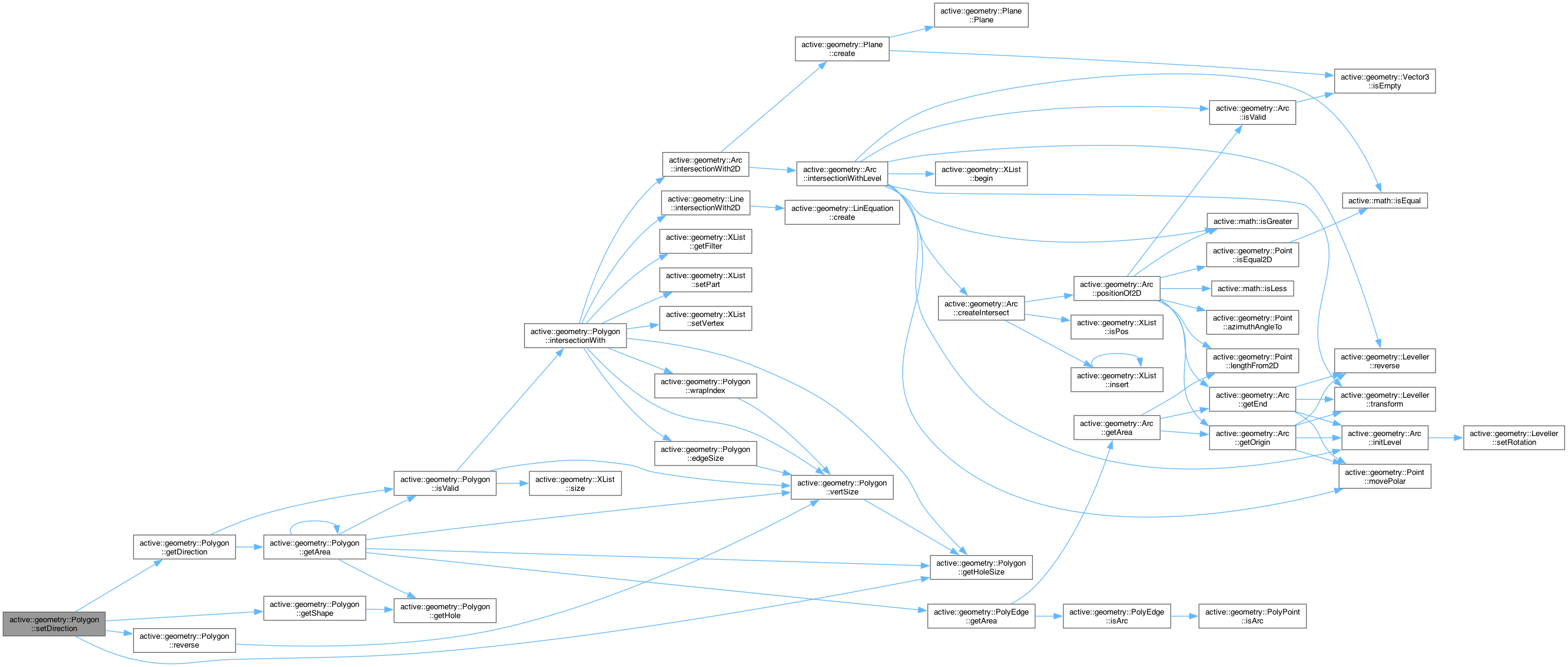
| virtual void | setDirection (Rotation direct=clockwise, bool withHoles=true, bool invertHoleDir=false) |
| virtual void | reverse () |
| bool | removeDuplicates2D (double prec=math::eps) |
| bool | removeDuplicates3D (double prec=math::eps) |
| void | optimise (bool doColin=false, double prec=math::eps) |
| void | renumber (bool restart=false) |
| void | facet () |
| void | setBaseLevel (double z=0) |
| void | alignTo (const Plane &plane) |
| Public Member Functions inherited from active::container::Vector< PolyPoint > | |
| Vector (size_type toReserve=0) | |
| Vector (const std::initializer_list< Derived > &items) | |
| Vector (const Vector &source) | |
| Vector (Vector &&source) | |
| virtual | ~Vector ()=default |
| auto | operator= (const Vector &source) |
| auto | operator= (Vector &&source) |
| void | push_back (PolyPoint *item) |
| void | emplace_back (PolyPoint &&item) |
| void | emplace_back (const PolyPoint &item) |
| void | emplace_back (value_type &&item) |
| void | emplace_back (value_type &item) |
| auto | insert (const_iterator pos, PolyPoint *item) |
| auto | emplace (const_iterator pos, PolyPoint &&item) |
| auto | emplace (const_iterator pos, value_type &item) |
| auto | release (iterator &pos) |
| auto | release (const_iterator pos) |
| Public Member Functions inherited from active::utility::Cloner | |
| virtual | ~Cloner ()=default |
| Public Member Functions inherited from active::utility::Mover | |
| virtual | ~Mover ()=default |
Public Attributes | |
| bool | isHole = false |
| True if the polygon is a hole. | |
| bool | isClosed = true |
| True if the polygon is closed, i.e. an edge is assumed from the last vertex to the first. | |
Static Public Attributes | |
| static const vertex_index | defSize = 5 |
| The default number of vertices in a new polygon. | |
Detailed Description
A class to represent a polygon (or open polyline)
NB: Refer to PolyPoint for an description of the vertex/edge class. A polygon/polyline is simply an array of PolyPoint objects (or objects serived from PolyPoint). Note that using an array of polymorphic objects (allocated on the heap) is intentional. Although not as fast as a contiguous allocation for the entire array, supporting a polymorphic vertex type supports additional metadata describing the edge leading to the edge (or the vertex itself in some cases). The base PolyPoint class only defines a sweep angle for the edge, but polygonal shapes often add more information, e.g. graphic attributes (colour/linetype/etc) or 3D properties (edge profile/visibility/etc). Maintaining parallel arrays or vertices and edges compounds the complexity of all functions that mutate the polygon shape. Any function processing or mutating polygon vertices can treat any polygon in the same way irrespective of the associated metadata. Although there is a slight speed penalty to this approach, the ease of managing polygon content outweighs it (and alernative may not ultimately prove to be faster).
A Polygon can be marked as open or closed - open simply means there is no edge connecting the first and last vertex, i.e. an open polyline. This modifies functions like edgeSize (counts the number of edges) which will be less than the number or vertices for open polylines. Closure should not be denoted by duplicating the first into the last (this is seen as a redundancy at best).
The Polygon array acts like a loop for indexing or subscripting into a specific vertex, e.g. the last vertex can be accessed like this:
auto lastVertex = polygon[-1];
Therefore it is impossible for the index to be out of range (unless the polygon is empty). This greatly simplifies algorithms that iterate through the edges - it is perfectly valid to write:
double len = 0.0;
for (auto vertex = edgeSize(); vertex--; )
len += (*this)[vertex + 1]->lengthFrom2D(*(*this)[vertex]);
…where vertex + 1 will exceed the array bounds and loop back to the first vertex (0).
Constructor & Destructor Documentation
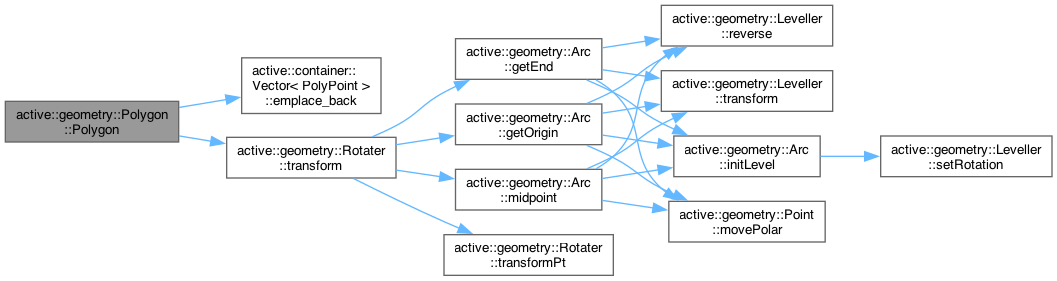
◆ Polygon() [1/5]
| Polygon::Polygon | ( | vertex_index | size = defSize, |
| part_index | holeSize = 0, | ||
| bool | isClosed = true ) |
Constructor
- Parameters
-
size The number of vertices to reserve space for holeSize The number of holes to reserve space for isClosed Set to true if this polygon is closed
◆ Polygon() [2/5]
|
inline |
Constructor
- Parameters
-
points The polygon vertices isClosed Set to true if this polygon is closed
◆ Polygon() [3/5]
| Polygon::Polygon | ( | const Box & | source, |
| double | angle = 0.0 ) |
Constructor
- Parameters
-
source The box to base the construction of this polygon on angle The rotation angle of the box
◆ Polygon() [4/5]
| Polygon::Polygon | ( | const Polygon & | source | ) |
Copy constructor
- Parameters
-
source The object to copy
◆ Polygon() [5/5]
|
noexcept |
Move constructor
- Parameters
-
source The object to move
◆ ~Polygon()
|
virtualdefault |
Destructor
Member Function Documentation
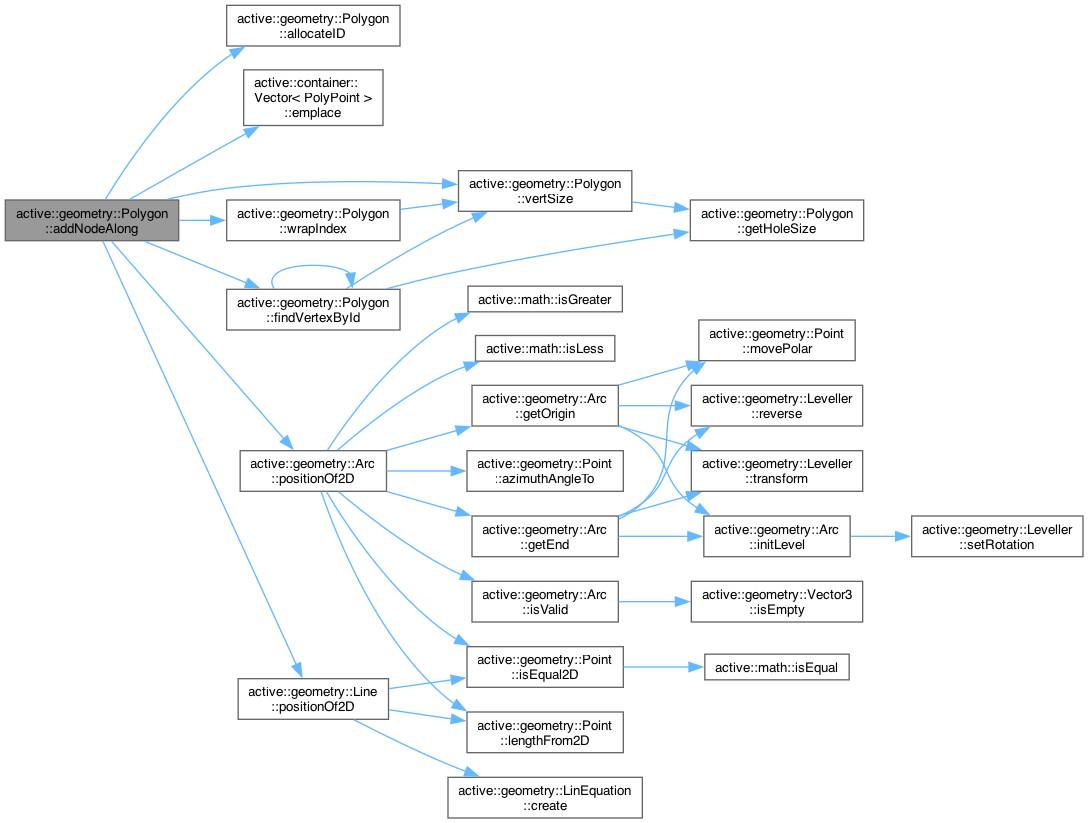
◆ addNodeAlong()
Introduce a new node along the specified polygon edge
- Parameters
-
ID The ID of the edge vertex to start searching from pos The coordinates of the new node prec The required precision
- Returns
- The ID of the new node (0 on failure)

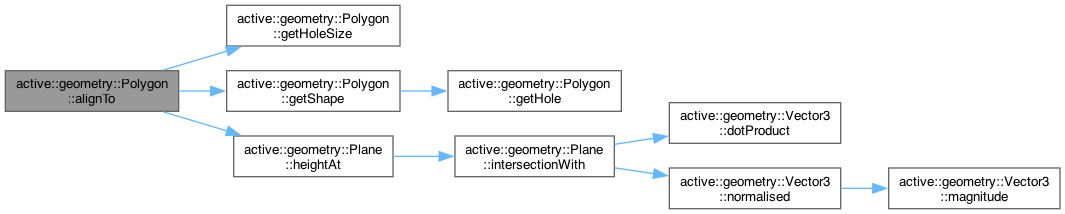
◆ alignTo()
| void Polygon::alignTo | ( | const Plane & | plane | ) |
Align the z coordinates of the polygon vertices to a specified plane
- Parameters
-
plane The plane to align the polygon to
◆ allocateID()
|
inline |
Allocate a new vertex ID
- Returns
- A new vertex ID

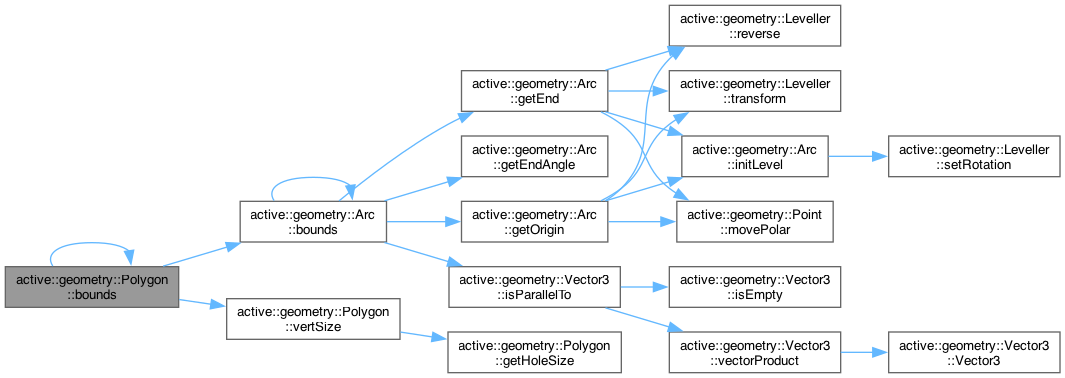
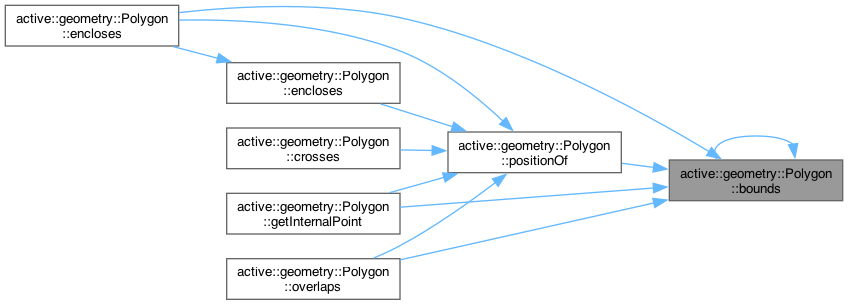
◆ bounds()
| Box::Option Polygon::bounds | ( | ) | const |
Get the polygon bounds
- Returns
- The polygon bounds
◆ clear()
| void Polygon::clear | ( | bool | allVertices = true, |
| bool | allHoles = true ) |
Clear the specified polygon content
- Parameters
-
allVertices True to clear all vertices allHoles True to clear all holes

◆ cloneGeometry()
|
virtual |
Clone method, copying just the raw geometry (all vertices will be reduced to PolyPoints)
- Returns
- A duplicate of this object's geometry
◆ clonePtr()
|
inlinevirtual |
Clone method
- Returns
- A duplicate of this object
Implements active::utility::Cloner.

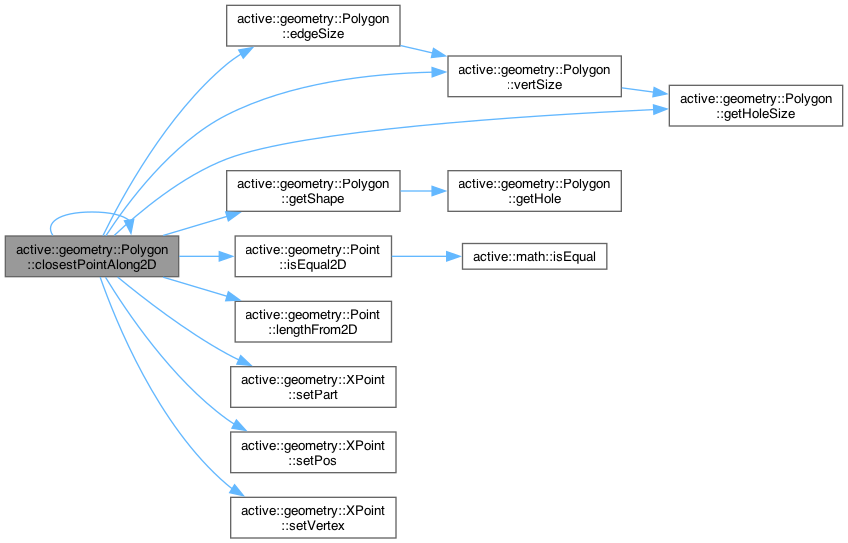
◆ closestPointAlong2D()
| XPoint Polygon::closestPointAlong2D | ( | const Point & | ref, |
| bool | withHoles, | ||
| double | prec = math::eps ) const |
Get the closest point in the polygon to a given point in 2D
- Parameters
-
ref The reference point prec The required precision
- Returns
- The closest point in the polygon to the reference point, coupled with the intercept position info
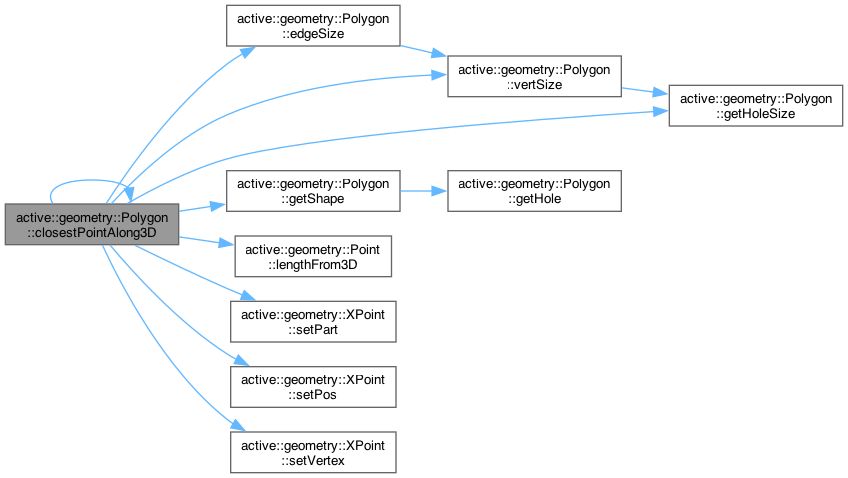
◆ closestPointAlong3D()
| XPoint Polygon::closestPointAlong3D | ( | const Point & | ref, |
| bool | withHoles, | ||
| double | prec = math::eps ) const |
Get the closest point in the polygon to a given point in 3D
- Parameters
-
ref The reference point prec The required precision
- Returns
- The closest point in the polygon to the reference point, coupled with the intercept position info
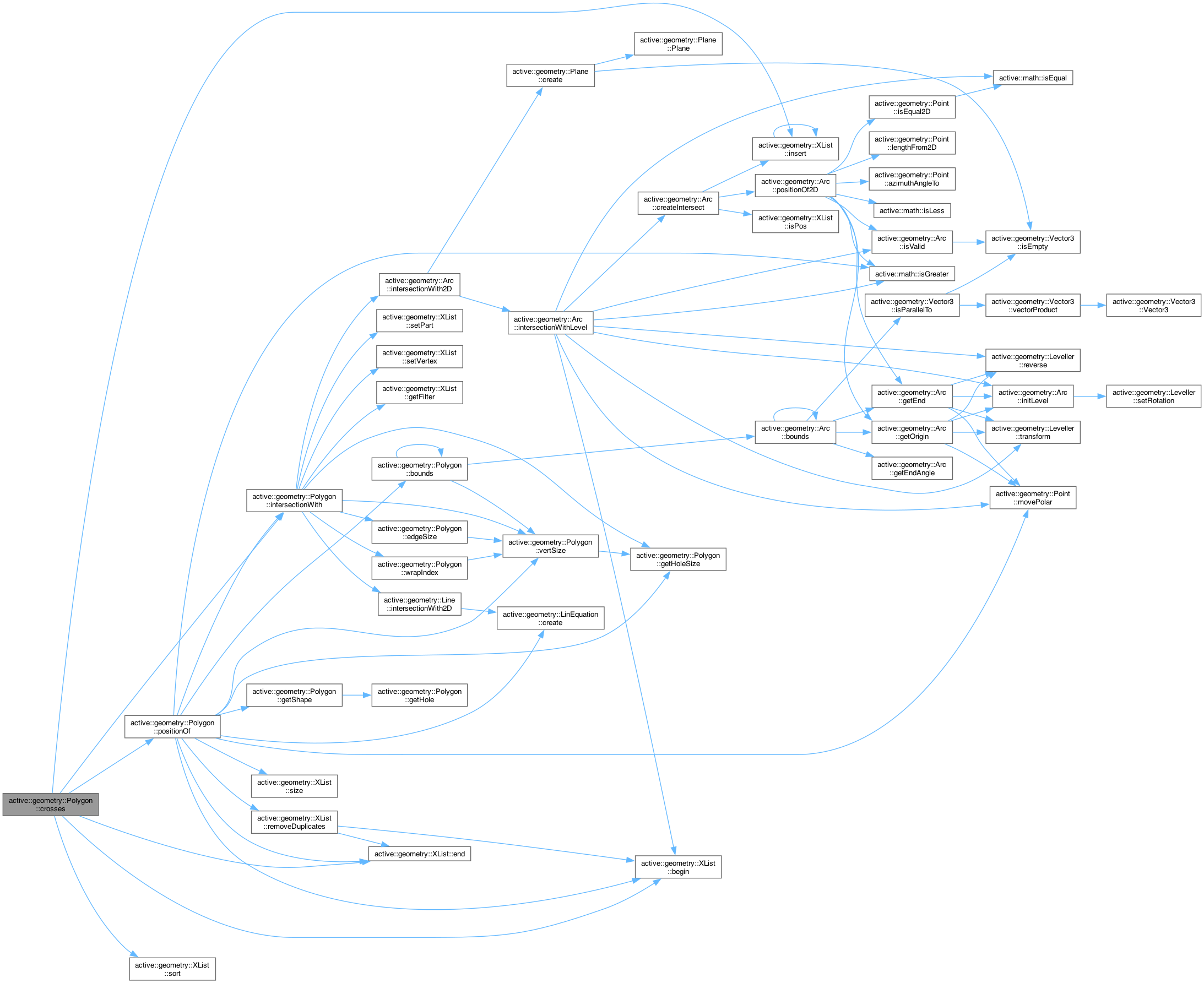
◆ crosses()
Determine if this crosses a specified line (not just touching)
- Parameters
-
ref The reference line prec The required precision
- Returns
- True if the polygon perimeter crosses the line
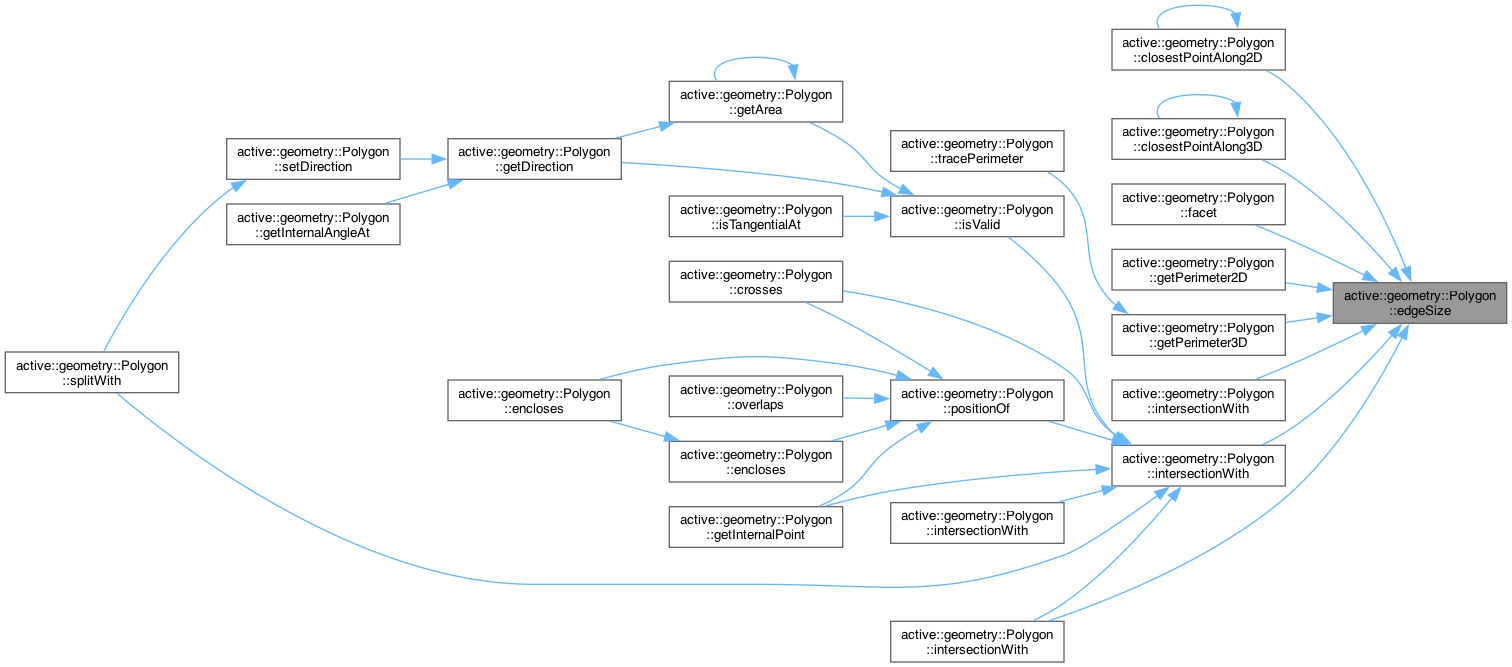
◆ edgeSize()
|
inline |
Get the number of edges in the polygon
- Returns
- The number of edges (dependent on whether a closed path is defined)

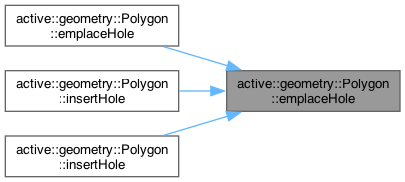
◆ emplaceHole() [1/2]
Emplace a hole in the polygon
- Parameters
-
hole The hole to emplace
- Returns
- The emplaced hole

◆ emplaceHole() [2/2]
| Polygon * Polygon::emplaceHole | ( | Polygon::Unique && | hole | ) |
Emplace a hole in the polygon
- Parameters
-
hole The hole to emplace
- Returns
- The emplaced hole
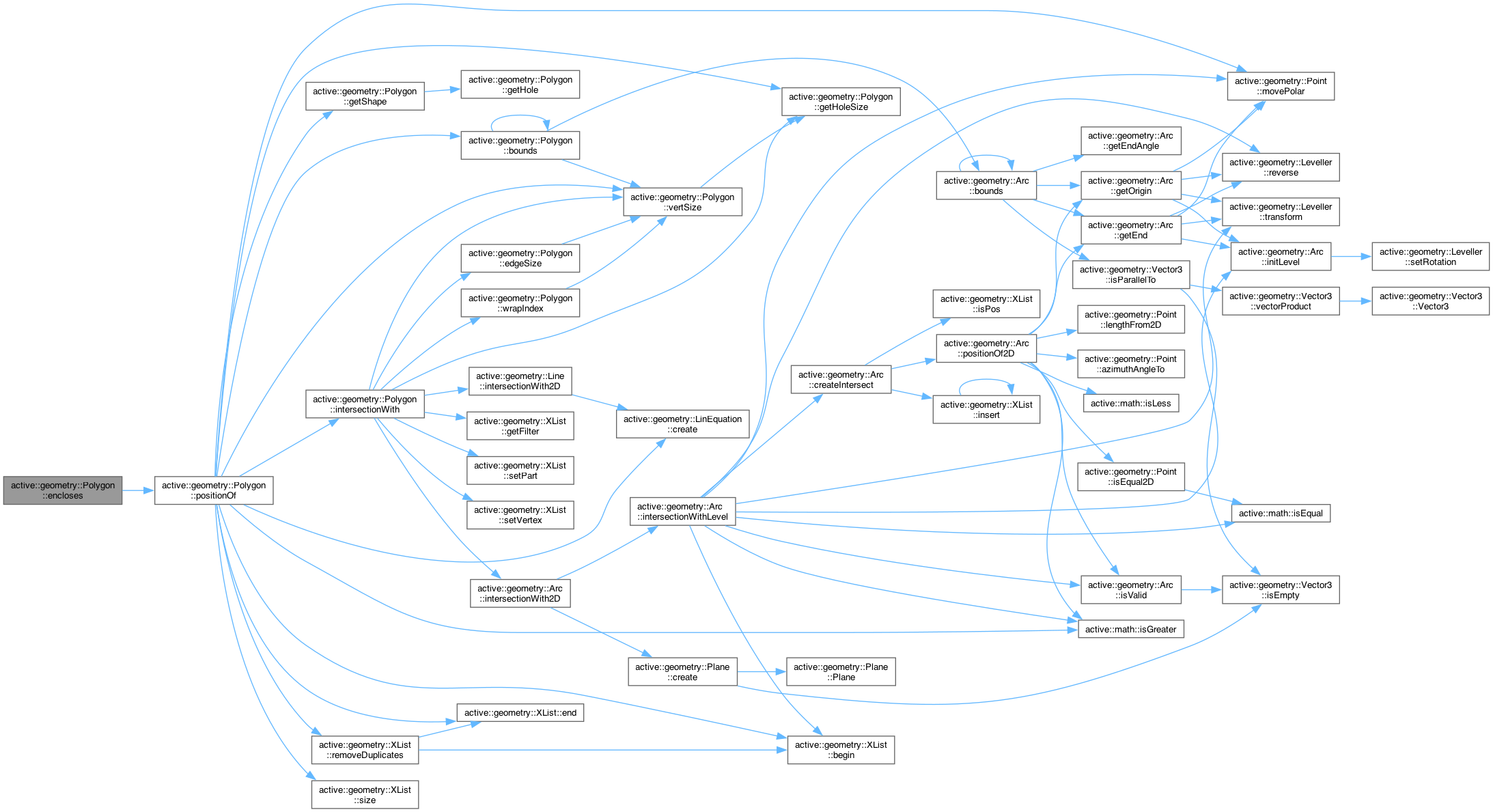
◆ encloses() [1/2]
Determine if the this encloses a specified point (closure assumed)
- Parameters
-
ref The reference point prec The required precision
- Returns
- True if the point is enclosed by the polygon (in or along)

◆ encloses() [2/2]
Determine if the this encloses a specified polygon (closure assumed)
- Parameters
-
ref The reference point prec The required precision
- Returns
- True if the polygon is enclosed by this (in or along)
◆ facet()
| void Polygon::facet | ( | ) |
Facet the curved edges on the polygon
◆ findVertexById()
| std::optional< Polygon::Index > Polygon::findVertexById | ( | vertex_id | ID | ) | const |
Find a vertex with the specified ID (optionally searching holes)
- Parameters
-
ID The ID to search for
- Returns
- The index of a vertex with the specified ID (nullopt on failure)


◆ findVertexByLocation()
| std::optional< Polygon::Index > Polygon::findVertexByLocation | ( | const Point & | pt, |
| double | prec = math::eps ) const |
Find a vertex at the specified point
- Parameters
-
pt The point to match prec The required precision
- Returns
- The index of a vertex at the specified point (npos = failure)

◆ getArea()
| double Polygon::getArea | ( | bool | isNet = true, |
| bool | isResultSigned = false ) const |
Calculate the polygon area (closure assumed)
- Parameters
-
isNet True if the net area is calculated (less holes) isResultSigned True if the result should be signed (reflecting the polygon direction)
- Returns
- The total area

◆ getDirection()
| std::optional< Rotation > Polygon::getDirection | ( | ) | const |
Get the direction of the polygon
- Returns
- The polygon direction (nullopt if the polygon is invalid)

◆ getHole()
| Polygon * Polygon::getHole | ( | part_index | which | ) | const |
Get the requested hole
- Parameters
-
which The index of the polygon to get
- Returns
- The requested polygon
◆ getHoles()
|
inline |
Get the list of holes in this polygon
- Returns
- The list of holes in this polygon
◆ getHoleSize()
| part_index Polygon::getHoleSize | ( | ) | const |
Get the number of holes in the polygon
- Returns
- The number of holes in the polygon
◆ getInternalAngleAt()
| double Polygon::getInternalAngleAt | ( | vertex_index | index | ) | const |
Get the internal angle between the edges at the given index index The vertex index return The angle between the two edges
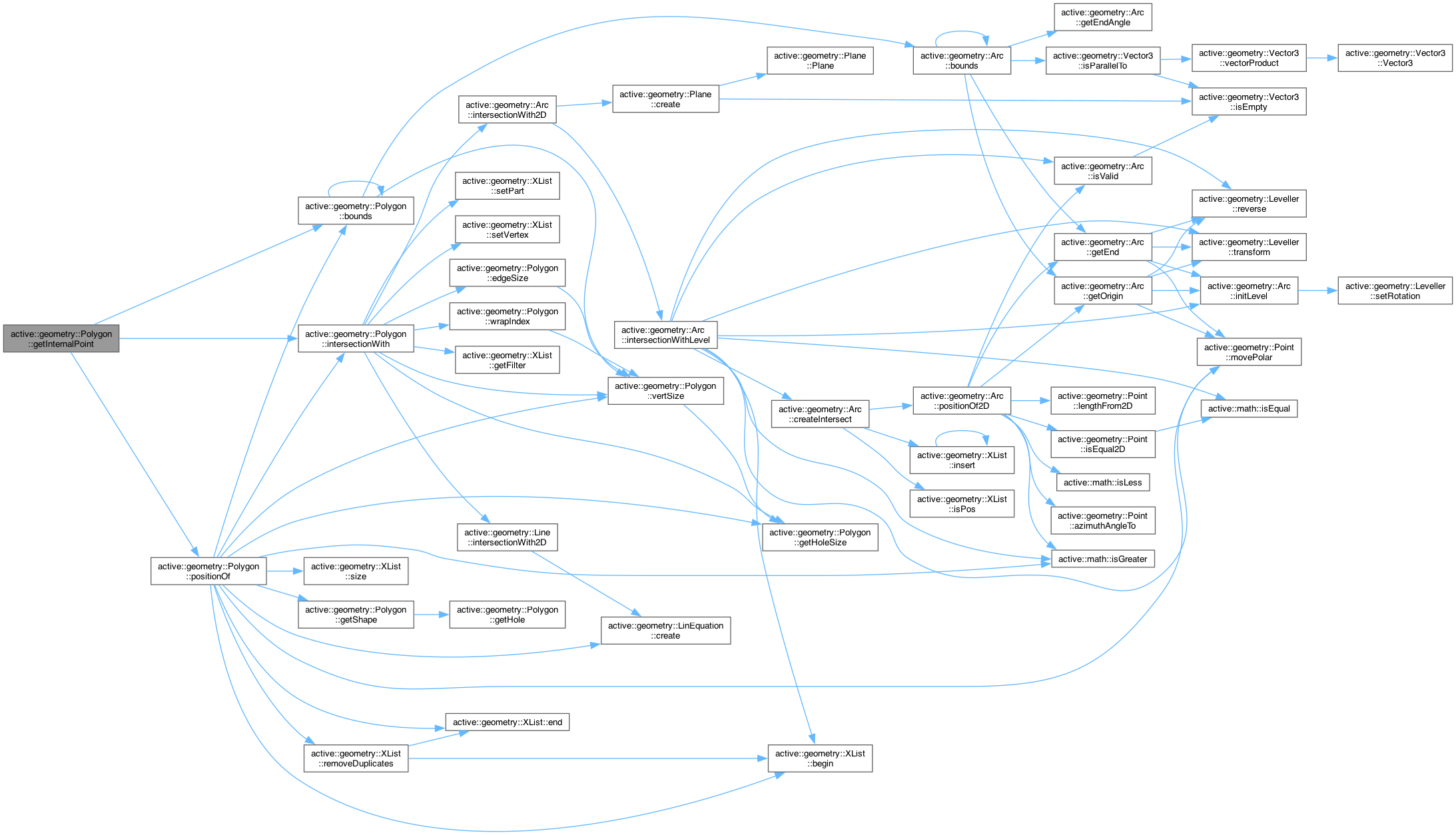
◆ getInternalPoint()
| Point::Option Polygon::getInternalPoint | ( | ) | const |
Get a point inside the polygon
- Returns
- A point inside the polygon (nullopt on failure)
◆ getPerimeter2D()
| double Polygon::getPerimeter2D | ( | ) | const |
Calculate the polygon perimeter (non-closure handled)
- Returns
- The total perimeter (plan only)

◆ getPerimeter3D()
| double Polygon::getPerimeter3D | ( | ) | const |
Calculate the polygon perimeter (non-closure handled)
- Returns
- The total perimeter (3D polyline)


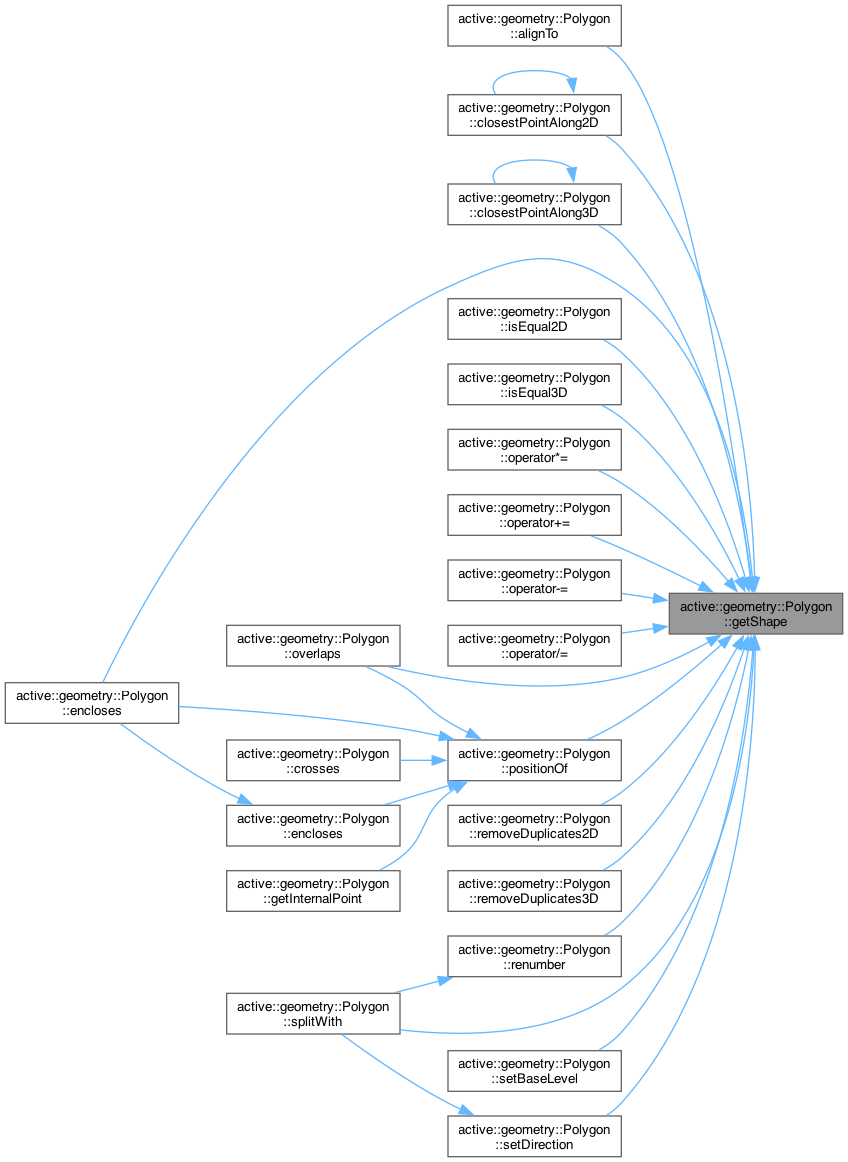
◆ getShape() [1/2]
| Polygon & Polygon::getShape | ( | part_index | index | ) |
Get one of the subpolygons of which this polygon consists
- Parameters
-
index The index of the shape
- Returns
- If index == 0, the polygon itself, otherwise the hole with number index - 1

◆ getShape() [2/2]
| const Polygon & Polygon::getShape | ( | part_index | index | ) | const |
Get one of the subpolygons of which this polygon consists
- Parameters
-
index The index of the shape
- Returns
- If index == 0, the polygon itself, otherwise the hole with number index - 1

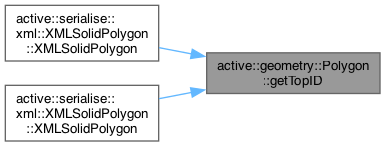
◆ getTopID()
|
inline |
Get the highest vertex ID
- Returns
- The highest vertex ID
◆ insertHole() [1/2]
Insert a hole in the polygon
- Parameters
-
hole The hole to insert
- Returns
- The inserted hole

◆ insertHole() [2/2]
Insert a hole in the polygon
- Parameters
-
hole The hole to insert (nullptr = create a new polygon)
- Returns
- The inserted hole

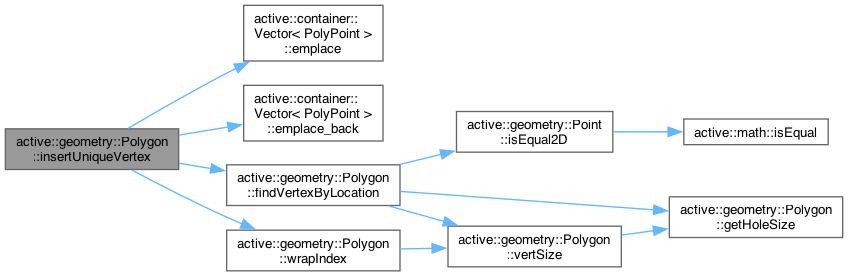
◆ insertUniqueVertex()
|
virtual |
Insert a new node to a polygon, testing that the vertex is unique
- Parameters
-
pt The new node to insert where The position to insert the new point (nullopt = at the end)
- Returns
- True if the new vertex is unique (not inserted if false)

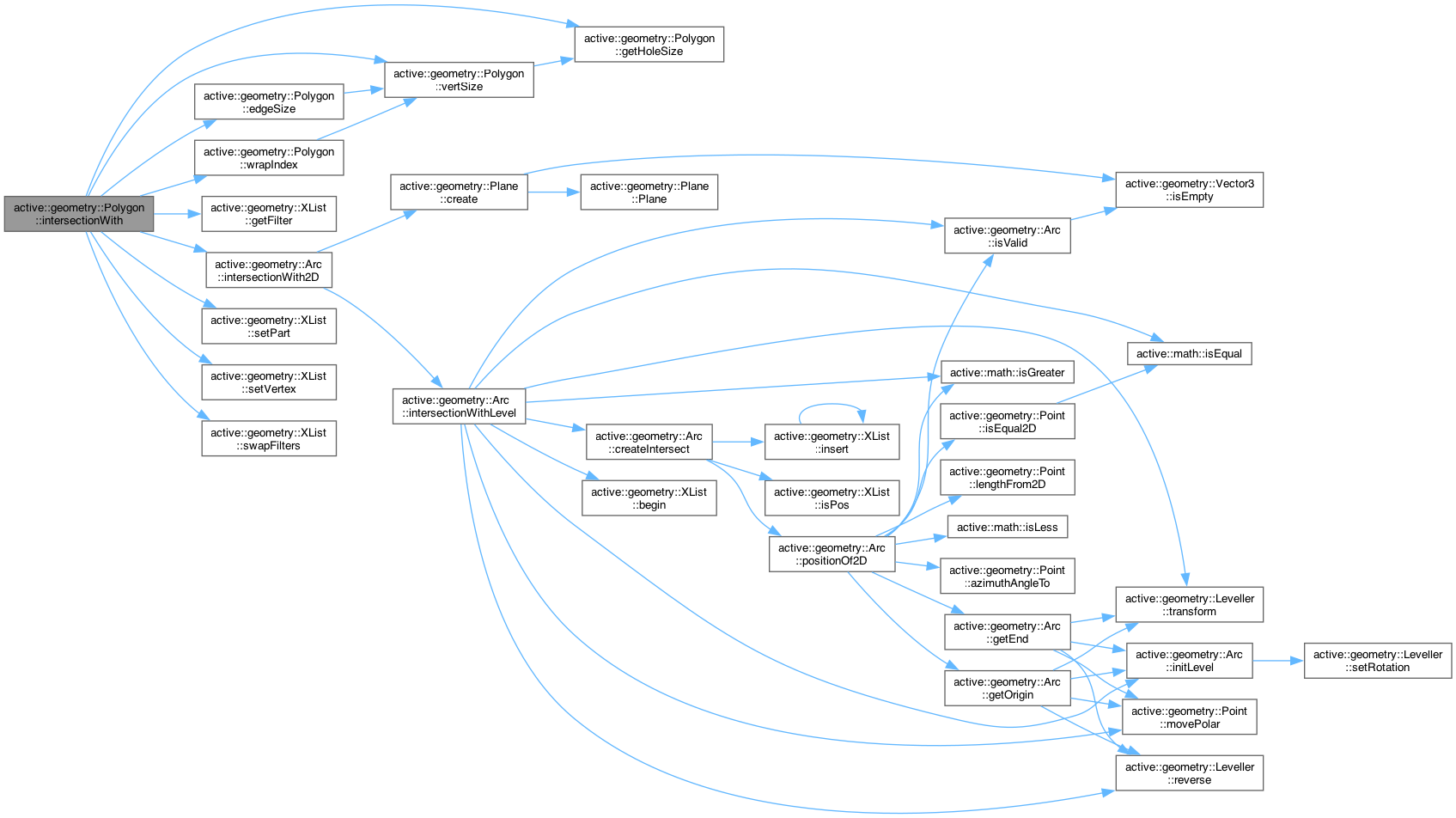
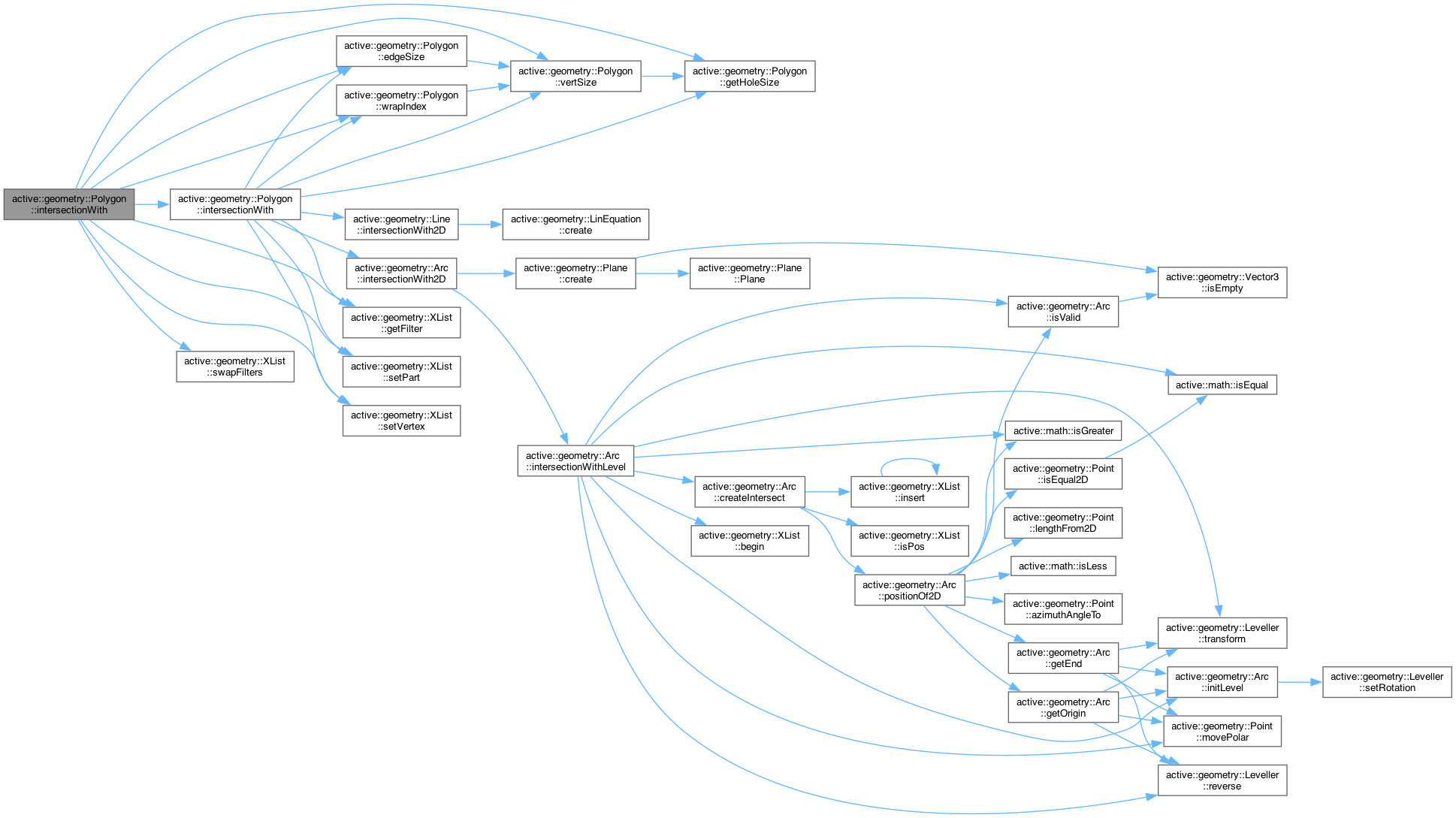
◆ intersectionWith() [1/4]
| vertex_index Polygon::intersectionWith | ( | const Arc & | ref, |
| XList & | inter, | ||
| double | prec = math::eps ) const |
Get the intersection(s) between this polygon and an arc
- Parameters
-
ref The reference arc inter The intersection list to populate prec The required precision
- Returns
- The number of intersections calculated
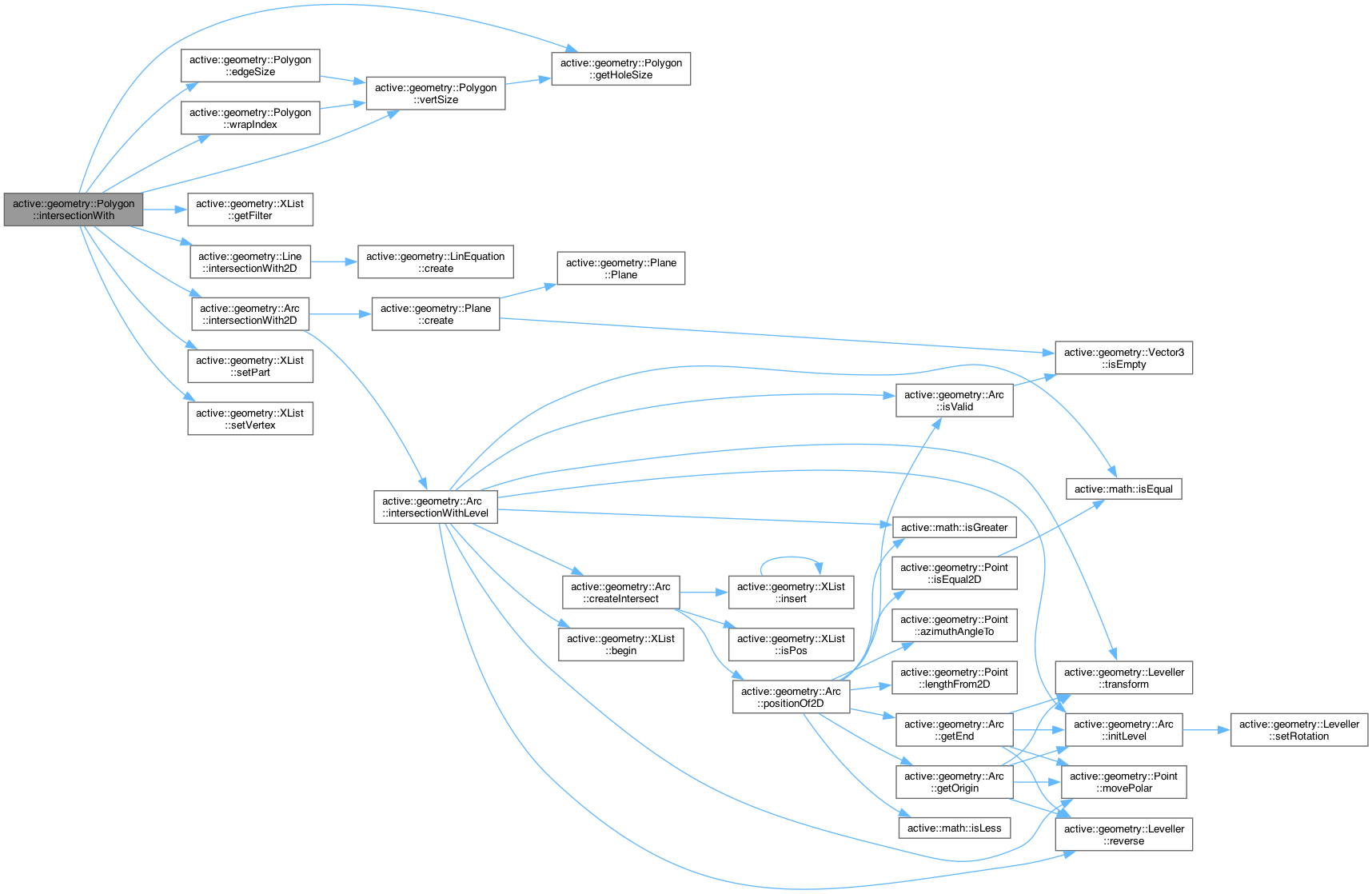
◆ intersectionWith() [2/4]
| vertex_index Polygon::intersectionWith | ( | const Line & | ref, |
| XList & | inter, | ||
| double | prec = math::eps ) const |
Get the intersection(s) between this polygon and a line
- Parameters
-
ref The reference line inter The intersection list to populate prec The required precision
- Returns
- The number of intersections calculated
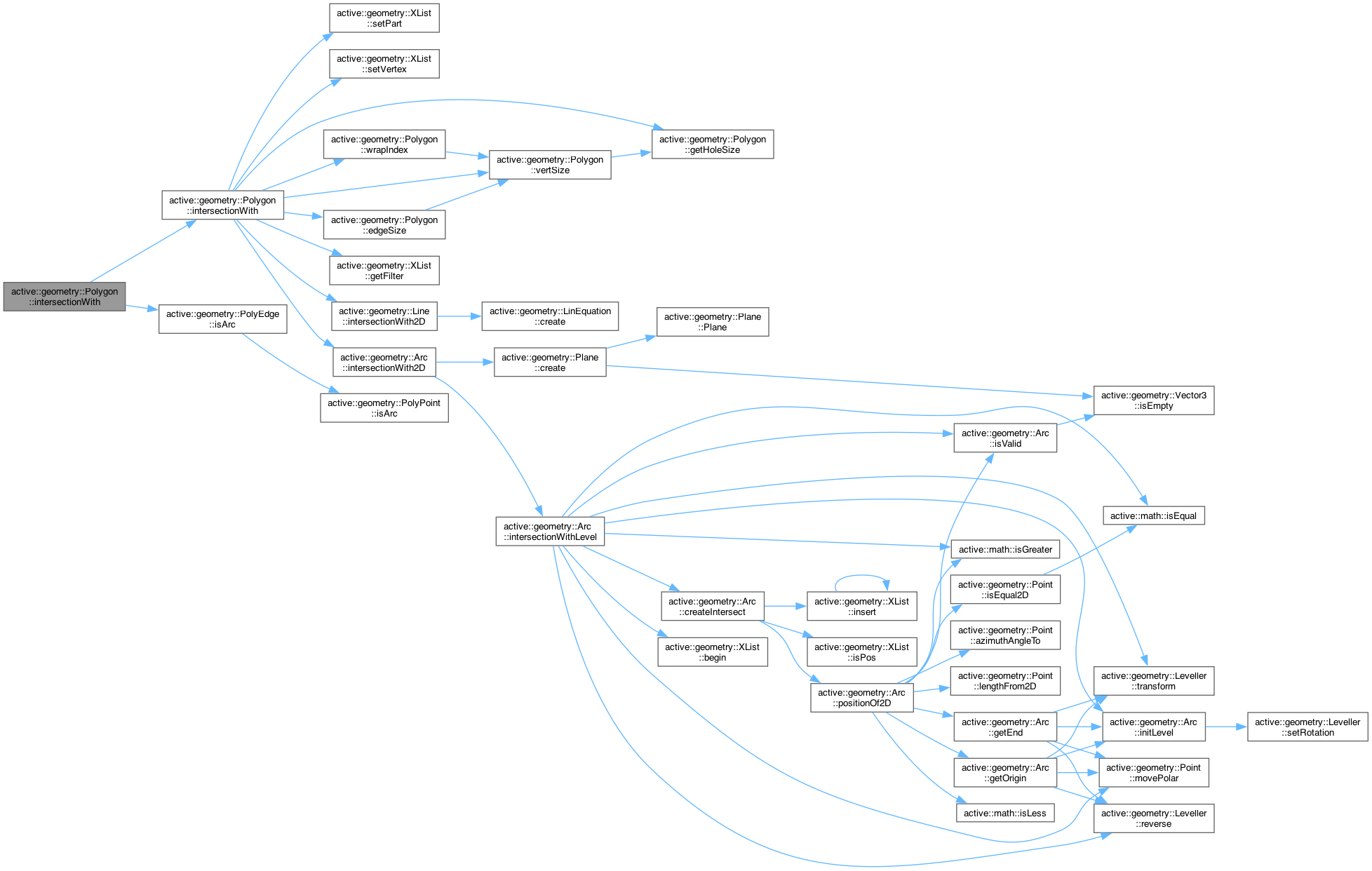
◆ intersectionWith() [3/4]
| vertex_index Polygon::intersectionWith | ( | const PolyEdge & | ref, |
| XList & | inter, | ||
| double | prec = math::eps ) const |
Get the intersection(s) between this polygon and a poly-edge
- Parameters
-
ref The reference poly-edge inter The intersection list to populate prec The required precision
- Returns
- The number of intersections calculated
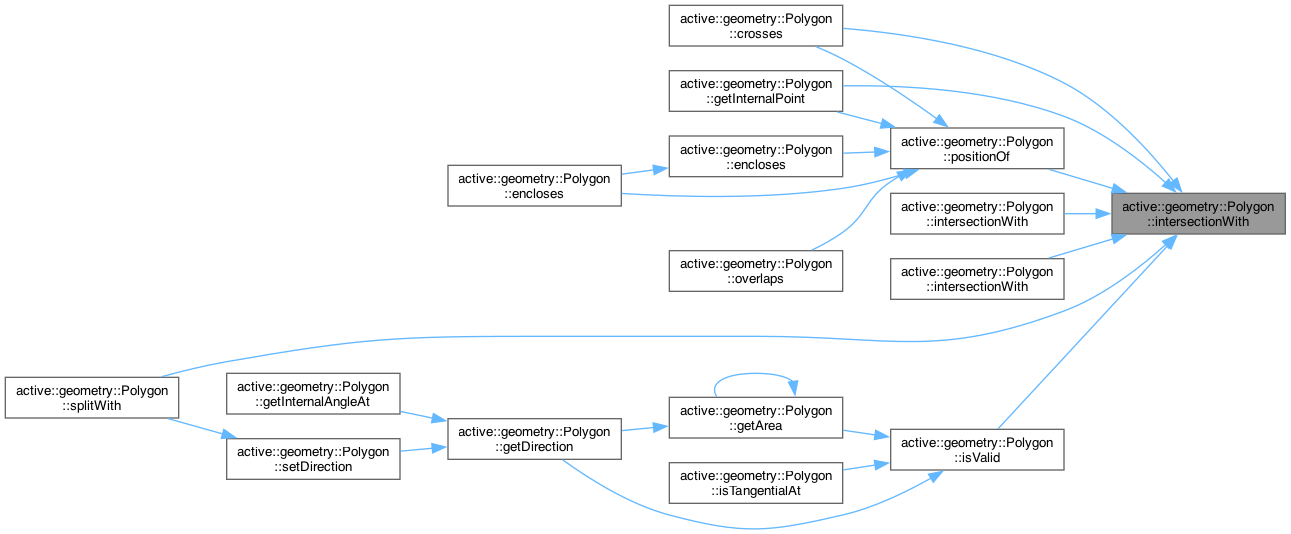
◆ intersectionWith() [4/4]
| vertex_index Polygon::intersectionWith | ( | const Polygon & | ref, |
| XList & | inter, | ||
| double | prec = math::eps ) const |
Get the intersection(s) between this polygon and another polygon
- Parameters
-
ref The reference polygon inter The intersection list to populate prec The required precision
- Returns
- The number of intersections calculated
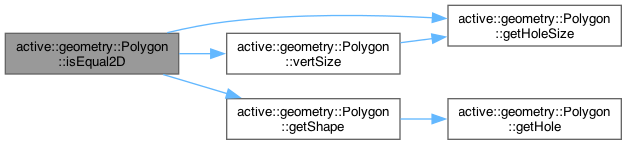
◆ isEqual2D()
Determine if two polygons are equal in 2D
- Parameters
-
ref The polygon to compare prec The required precision
- Returns
- True if the polygons are identical
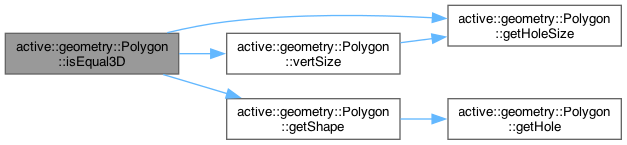
◆ isEqual3D()
Determine if two polygons are equal in 3D
- Parameters
-
ref The polygon to compare prec The required precision
- Returns
- True if the polygons are identical
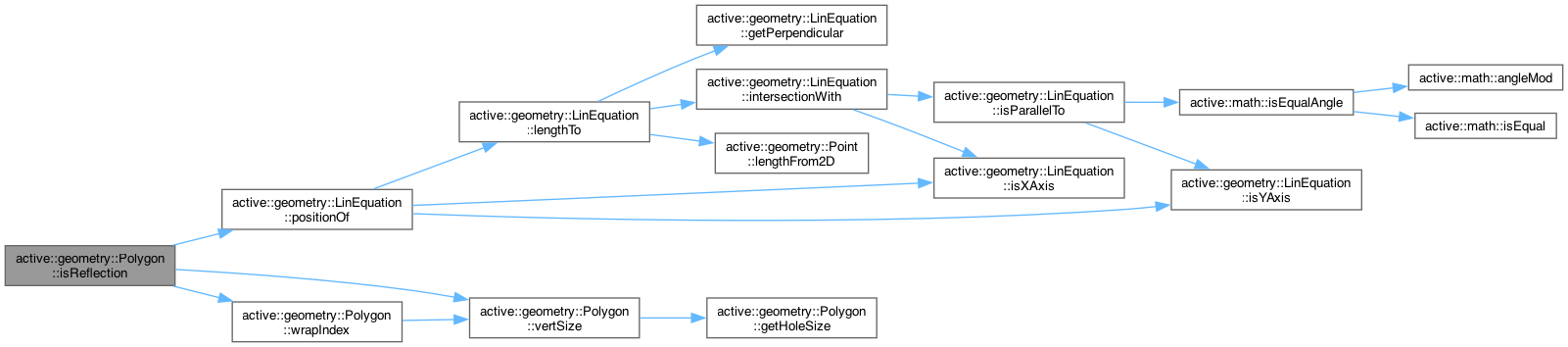
◆ isReflection()
| bool Polygon::isReflection | ( | vertex_index | index, |
| const LinEquation & | ref, | ||
| double | prec = math::eps ) const |
Determine if the polygon reflects off a specified line at a specified vertex
- Parameters
-
index The index of the vertex to test ref The reference line prec The required precision
- Returns
- True if a reflection ocurrs at the specified index
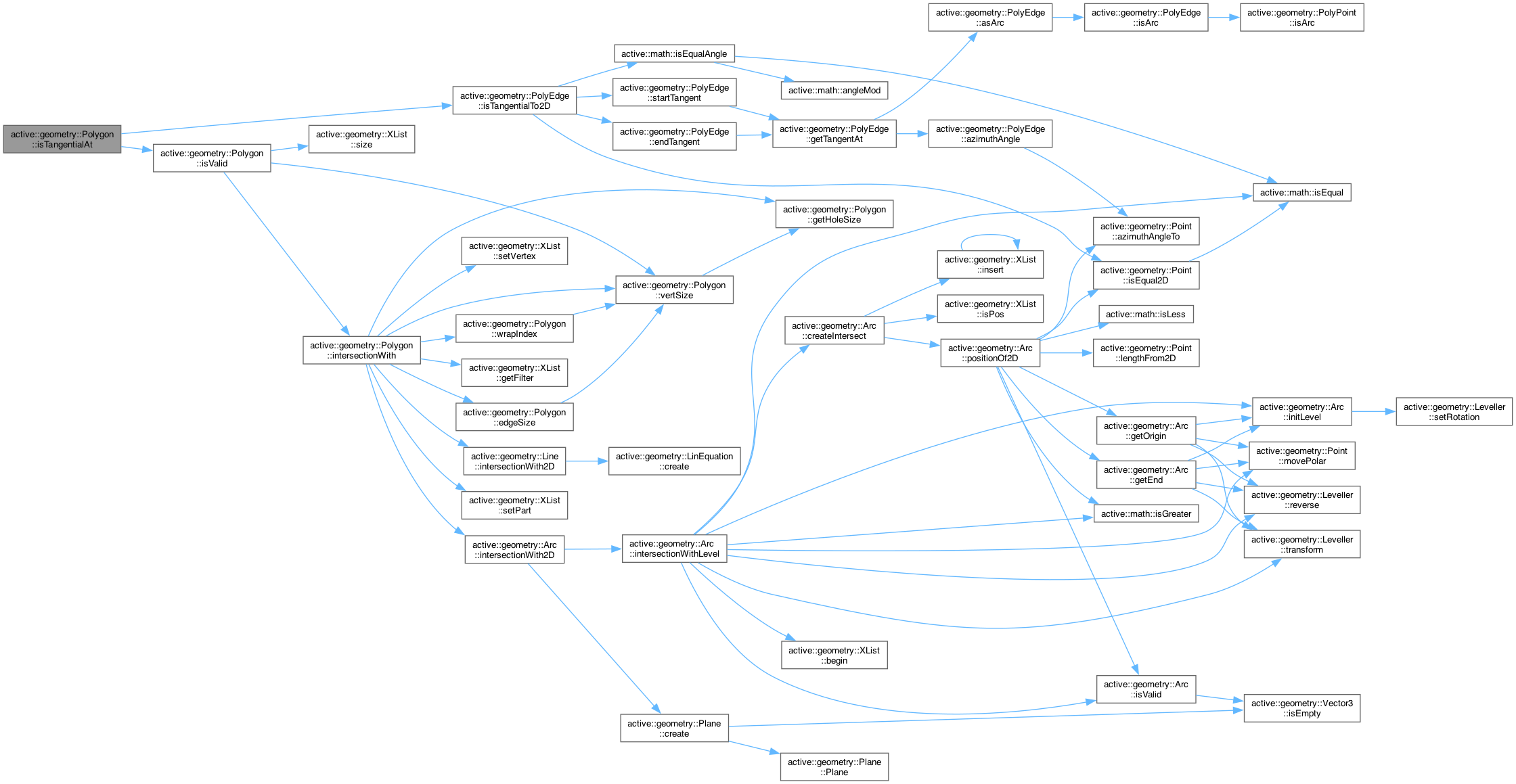
◆ isTangentialAt()
| bool Polygon::isTangentialAt | ( | vertex_index | vertex, |
| double | anglePrec = math::epsAngle ) const |
Determine if the edges at a specified vertex are tangential
- Parameters
-
vertex The index of the vertex to check anglePrec The angle precision
- Returns
- true if the incident and emerging edges are tangential
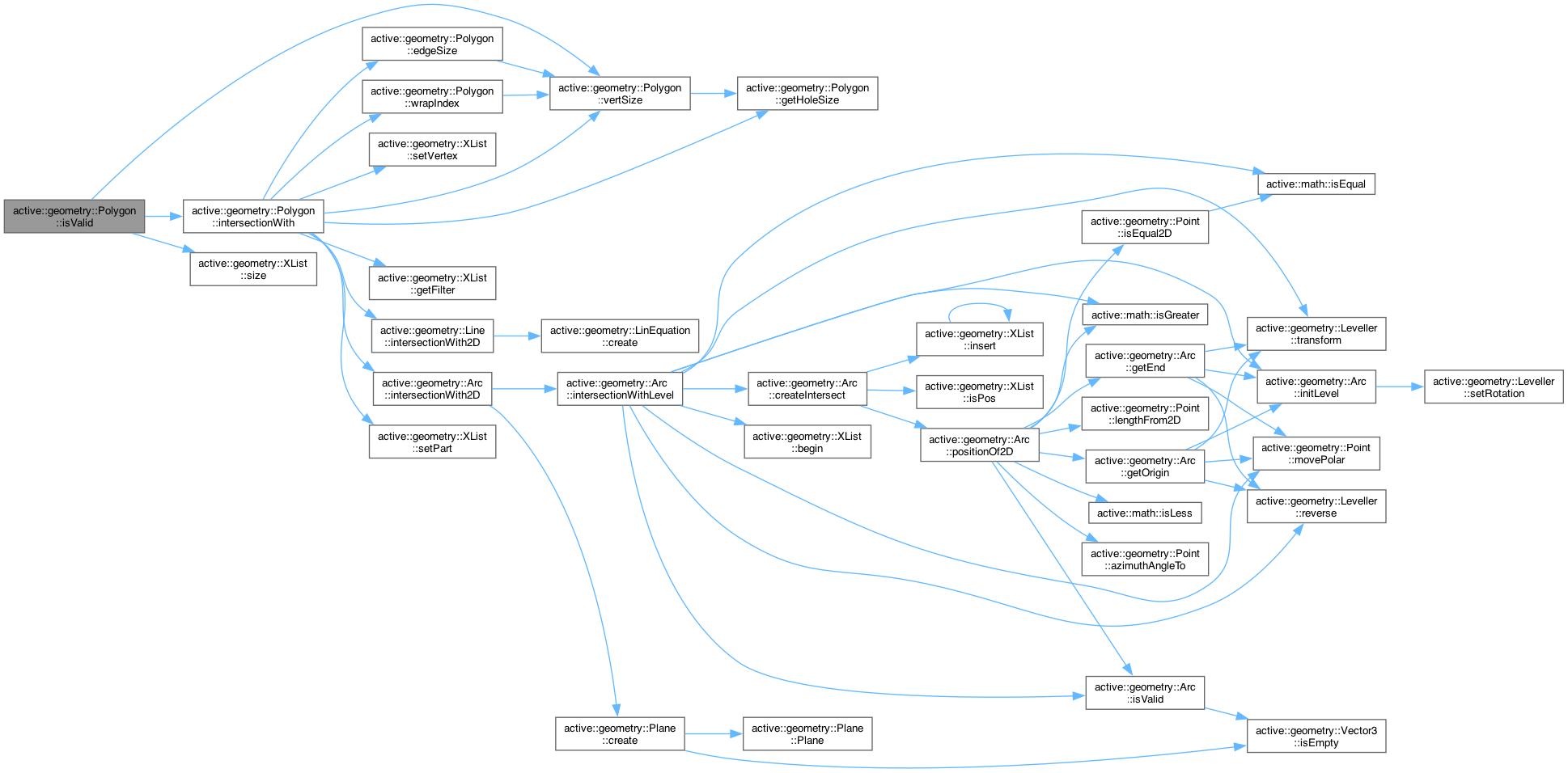
◆ isValid()
|
virtual |
Determine if the polygon is valid (must have 2 or more vertices)
- Parameters
-
doIntersect True if the polygon should be checked for intersecting edges (crossing each other) prec The required precision
- Returns
- True if this is a valid polygon

◆ iteratorAt() [1/2]
| Polygon::base::iterator Polygon::iteratorAt | ( | vertex_index | index | ) |
Get an iterator pointing to the specified vertex
- Parameters
-
index The vertex index (will be wrapped)
- Returns
- The requested iterator

◆ iteratorAt() [2/2]
| Polygon::base::const_iterator Polygon::iteratorAt | ( | vertex_index | index | ) | const |
Get an iterator pointing to the specified vertex
- Parameters
-
index The vertex index (will be wrapped)
- Returns
- The requested iterator

◆ movePtr()
|
inlinevirtual |
Object cloning with move
- Returns
- A clone of this object with resources moved to the clone
Implements active::utility::Mover.

◆ operator*() [1/3]
| Polygon Polygon::operator* | ( | const double & | mult | ) | const |
Multiplication operator
- Parameters
-
mult The amount to scale the polygon by
- Returns
- A scaled copy of this
◆ operator*() [2/3]
Multiplication operator
- Parameters
-
mult The matrix to multiply the polygon by
- Returns
- The result
◆ operator*() [3/3]
Multiplication operator
- Parameters
-
mult The matrix to multiply the polygon by
- Returns
- The result
◆ operator*=() [1/3]
| Polygon & Polygon::operator*= | ( | const double & | mult | ) |
Multiplication with assignment operator
- Parameters
-
mult The amount to scale the polygon by
- Returns
- A reference to this
◆ operator*=() [2/3]
Multiplication with assignment operator
- Parameters
-
mult The matrix to multiply the polygon by
- Returns
- A reference to this
◆ operator*=() [3/3]
Multiplication with assignment operator
- Parameters
-
mult The matrix to multiply the polygon by
- Returns
- A reference to this
◆ operator+()
Addition operator
- Parameters
-
offset The amount to offset the polygon by
- Returns
- An offset copy of this
◆ operator+=()
Addition with assignment operator
- Parameters
-
offset The amount to offset the polygon by
- Returns
- A reference to this
◆ operator-()
Subtraction operator
- Parameters
-
offset The amount to offset the polygon by
- Returns
- An offset copy of this
◆ operator-=()
Subtraction with assignment operator
- Parameters
-
offset The amount to offset the polygon by
- Returns
- A reference to this
◆ operator/()
| Polygon Polygon::operator/ | ( | const double & | mult | ) | const |
Division operator
- Parameters
-
mult The amount to scale the polygon by
- Returns
- A scaled copy of this
◆ operator/=()
| Polygon & Polygon::operator/= | ( | const double & | mult | ) |
Division with assignment operator
- Parameters
-
mult The amount to scale the polygon by
- Returns
- A reference to this
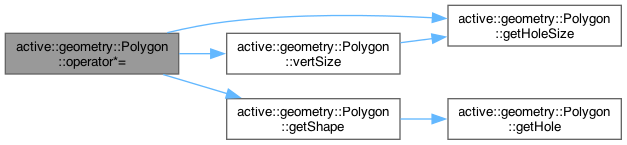
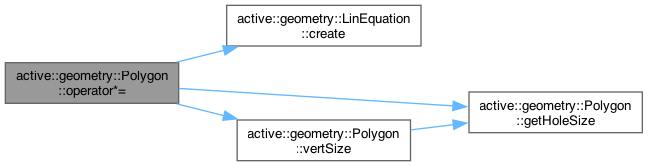
◆ operator=() [1/2]
Assignment operator
- Parameters
-
source The object to copy
- Returns
- A reference to this
◆ operator=() [2/2]
Assignment operator
- Parameters
-
source The object to move
- Returns
- A reference to this

◆ operator[]() [1/2]
| PolyPoint * Polygon::operator[] | ( | vertex_index | index | ) |
Subscript operator
- Parameters
-
index An index into the polygon
- Returns
- The indexed vertex

◆ operator[]() [2/2]
| const PolyPoint * Polygon::operator[] | ( | vertex_index | index | ) | const |
Subscript operator
- Parameters
-
index An index into the polygon
- Returns
- The indexed vertex

◆ optimise()
| void Polygon::optimise | ( | bool | doColin = false, |
| double | prec = math::eps ) |
Optimise the polygon (eliminate duplicates, co-linear points) param doColin True if colinear points should be removed
- Parameters
-
prec The required precision
◆ overlaps()
Determine if the this overlaps a specified polygon (closure assumed)
- Parameters
-
ref The reference point prec The required precision
- Returns
- True if the polygon is overlapped by this (partial or total)
◆ positionOf()
Get the position of a point relative to the polygon (closure assumed)
- Parameters
-
ref The reference point prec The required precision
- Returns
- The relative position
◆ releaseHole()
| Polygon::Unique Polygon::releaseHole | ( | part_index | which | ) |
Release a hole from the polygon
- Parameters
-
which The index of the hole to release
- Returns
- The released hole polygon
◆ releaseHoles()
| PolyVector::Unique Polygon::releaseHoles | ( | ) |
Remove the polygon holes and release them to the caller
- Returns
- The holes in the polygon
◆ removeDuplicates2D()
| bool Polygon::removeDuplicates2D | ( | double | prec = math::eps | ) |
Remove duplicate adjoining vertices in 2D
- Parameters
-
prec The required precision
- Returns
- True if duplicates were removed
◆ removeDuplicates3D()
| bool Polygon::removeDuplicates3D | ( | double | prec = math::eps | ) |
Remove duplicate adjoining vertices in 3D
- Parameters
-
prec The required precision
- Returns
- True if duplicates were removed
◆ removeHole()
| void Polygon::removeHole | ( | part_index | which | ) |
Remove a hole from the polygon
- Parameters
-
which The index of the hole to remove
◆ renumber()
| void Polygon::renumber | ( | bool | restart = false | ) |
Renumber the polygon vertices

◆ resolveSelfIntersect()
| part_index Polygon::resolveSelfIntersect | ( | PolyVector & | resolved, |
| double | prec = math::eps ) const |
Resolve the polygon into a list of polygons with no self-intersection
- Parameters
-
resolved The list of resolved polygons prec The required precision
- Returns
- The number of resolved polygons created (0 if the polygon is already resolved)

◆ reverse()
|
virtual |
Reverse the polygon direction (clockwise/anticlockwise)


◆ setBaseLevel()
| void Polygon::setBaseLevel | ( | double | z = 0 | ) |
Set the level (z coordinate) of all the polygon vertices
- Parameters
-
z The required level

◆ setDirection()
|
virtual |
Redirect the order of the polygon in the specified direction
- Parameters
-
direct The direction of the polygon withHoles True to also set the direction of holes invertHoleDir True to set the opposite sense for the holes

◆ setHoles() [1/2]
| void active::geometry::Polygon::setHoles | ( | PolyVector && | hole | ) |
Set the holes in the polygon
- Parameters
-
hole The list of holes to set in the polygon
◆ setHoles() [2/2]
| void active::geometry::Polygon::setHoles | ( | std::unique_ptr< PolyVector > && | holes = nullptr | ) |
Set the holes in the polygon
- Parameters
-
holes The list of holes to set in the polygon (nullptr to erase all)
◆ setTopID()
|
inline |
Set the highest vertex ID
- Parameters
-
topId The highest vertex ID
◆ splitWith() [1/2]
| void Polygon::splitWith | ( | const LinEquation & | ref, |
| PolyVector * | polyRight = nullptr, | ||
| PolyVector * | polyLeft = nullptr, | ||
| double | prec = math::eps ) const |
Calculate the polygons created by splitting this polygon along a line
- Parameters
-
ref The cutting line polyRight The split polygons to the right of the reference line (nullptr = discard) polyLeft The split polygons to the left of the reference line (nullptr = discard) prec The required precision
◆ splitWith() [2/2]
| void Polygon::splitWith | ( | const Polygon & | ref, |
| PolyVector * | polyIn = nullptr, | ||
| PolyVector * | polyOut = nullptr, | ||
| double | prec = math::eps ) const |
Calculate the polygons created by splitting this polygon with another polygon
- Parameters
-
ref The cutting polygon polyIn The split polygons inside the reference polygon (nullptr = discard) polyOut The split polygons outside the reference polygon (nullptr = discard) prec The required precision
◆ tracePerimeter()
| vertex_index Polygon::tracePerimeter | ( | double | len, |
| PolyPoint & | endPos ) const |
Trace the polygon perimeter for the specified length
- Parameters
-
len The length to length for endPos The point reached
- Returns
- The index of the last vertex passed
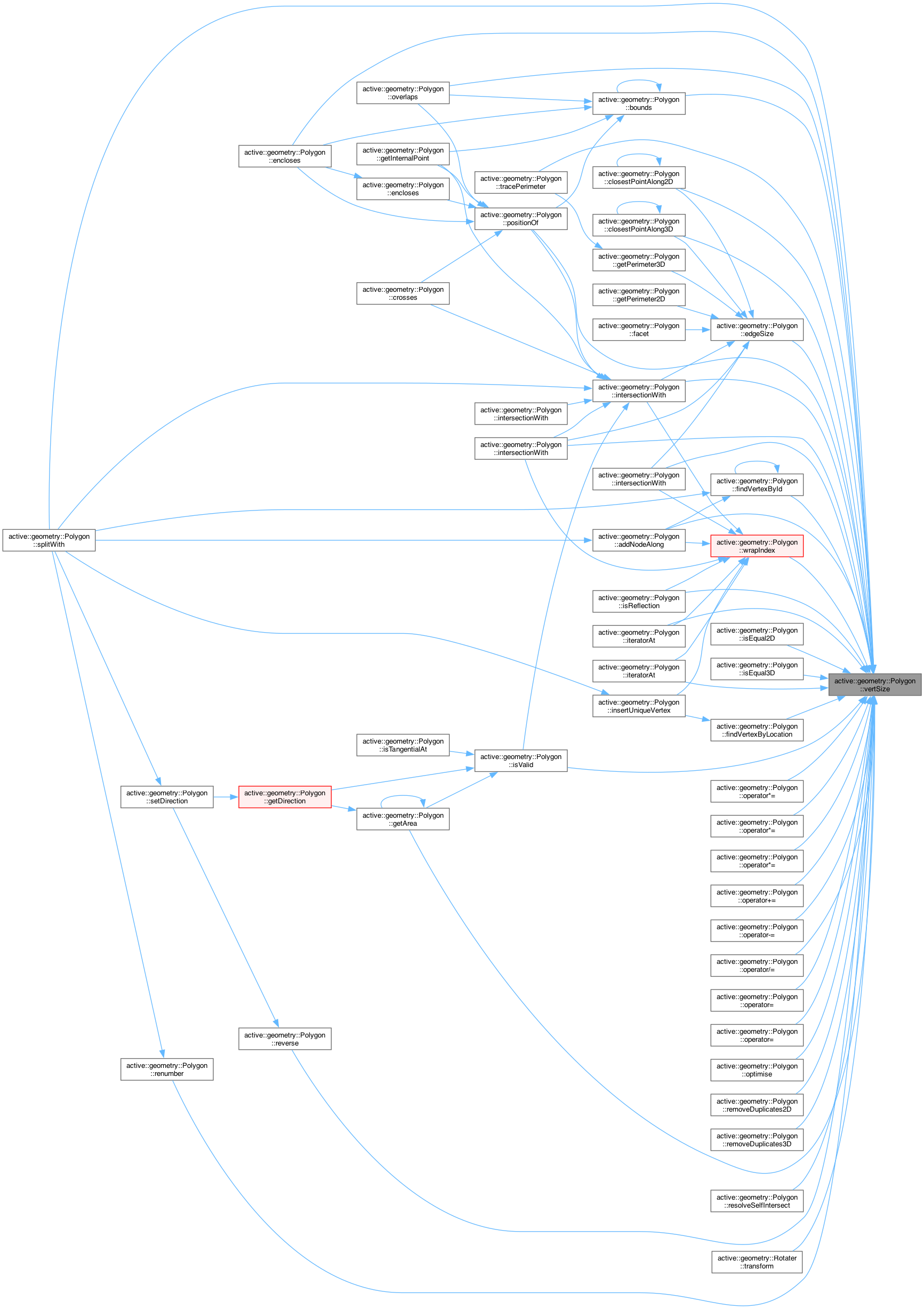
◆ vertSize()
| vertex_index Polygon::vertSize | ( | bool | isOuter = true | ) | const |
Get the number of vertices in the polygon
- Parameters
-
isOuter True to count the outer polygon vertices only (exclude holes)
- Returns
- The number of vertices

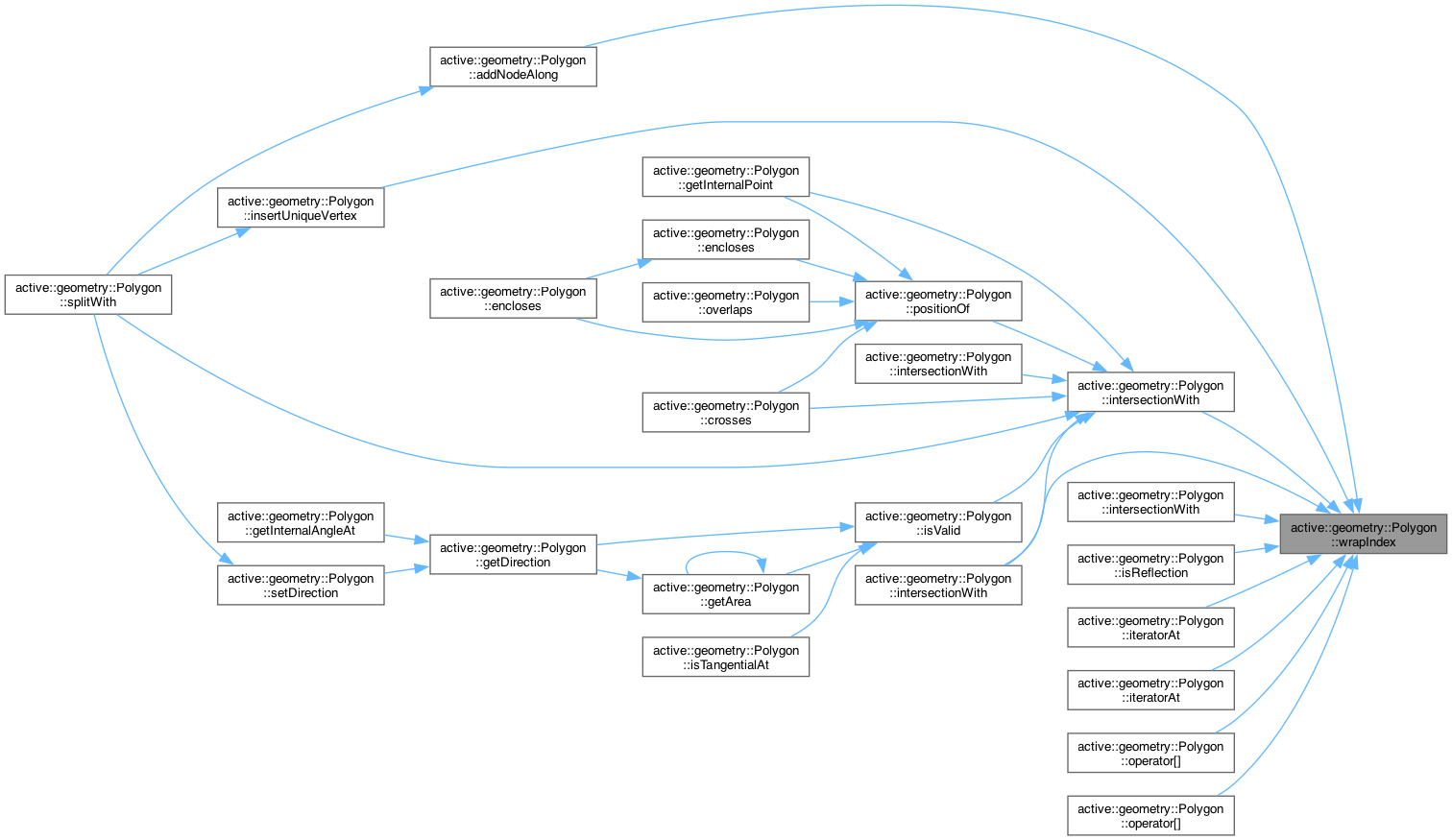
◆ wrapIndex()
| vertex_index Polygon::wrapIndex | ( | vertex_index | index | ) | const |
Wrap an index into the polygon range
- Parameters
-
index The index
- Returns
- The wrapped index

The documentation for this class was generated from the following files:
- /Users/rwessel/Documents/Development/ActiveLib/Active/Geometry/Polygon.h
- /Users/rwessel/Documents/Development/ActiveLib/Active/Geometry/Polygon.cpp