#include <Box.h>
Public Types | |
| using | Unique = std::unique_ptr<Box> |
| Unique pointer. | |
| using | Shared = std::shared_ptr<Box> |
| Shared pointer. | |
| using | Option = std::optional<Box> |
| Optional. | |
Public Member Functions | |
| Box () | |
| Box (const Point &origin, const Point &end) | |
| Box (double x1, double y1, double z1, double x2, double y2, double z2) | |
| Box (double width, double depth) | |
| ~Box () | |
| bool | operator== (const Box &ref) const |
| bool | operator!= (const Box &ref) const |
| Box & | operator= (const Box &source) |
| Box | operator+ (const Point &offset) const |
| Box & | operator+= (const Point &offset) |
| Box | operator- (const Point &offset) const |
| Box & | operator-= (const Point &offset) |
| Box | operator* (double scale) const |
| Box & | operator*= (double scale) |
| Box | operator/ (double scale) const |
| Box & | operator/= (double scale) |
| bool | isEqual2D (const Box &ref, double prec=math::eps) const |
| bool | isEqual3D (const Box &ref, double prec=math::eps) const |
| Point | getCentre () const |
| Point | getAnchor2D (Anchor2D anchor) const |
| double | getArea () const |
| double | getVolume () const |
| double | getWidth () const |
| double | getDepth () const |
| double | getHeight () const |
| double | getMaxLength () const |
| Position | positionOf2D (const Point &ref, double prec=math::eps) const |
| Position | positionOf3D (const Point &ref, double prec=math::eps) const |
| bool | encloses2D (const Box &ref, double prec=math::eps) const |
| bool | encloses3D (const Box &ref, double prec=math::eps) const |
| bool | overlaps2D (const Box &ref, double prec=math::eps) const |
| void | moveTo (const Point &position) |
| void | setCentre (const Point ¢re) |
| void | merge (const Point &ref) |
| void | merge (const Box &ref) |
| void | sort () |
| void | magnify (double scale) |
| void | resize (double len) |
| void | rotate (double angle) |
Public Attributes | |
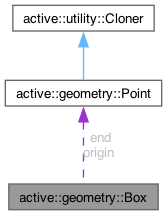
| Point | origin |
| Box origin (for diagonally opposite points) | |
| Point | end |
| Box end. | |
Detailed Description
Class to represent a box (rectilinear bounds in 3 dimensions described by 2 diagonally opposite points)
Constructor & Destructor Documentation
◆ Box() [1/4]
|
inline |
Constructor
◆ Box() [2/4]
Constructor
- Parameters
-
origin One corner of the box end The opposite corner of the box
◆ Box() [3/4]
|
inline |
Constructor
- Parameters
-
x1 Bounding coordinates of the box
◆ Box() [4/4]
|
inline |
Constructor
- Parameters
-
width The box width depth The box depth
◆ ~Box()
|
inline |
Destructor
Member Function Documentation
◆ encloses2D()
Determine if the this encloses a specified box in 2D
- Parameters
-
ref The reference box prec The required precision
- Returns
- True if the box is enclosed by this (in or along)

◆ encloses3D()
Determine if the this encloses a specified box in 3D
- Parameters
-
ref The reference box prec The required precision
- Returns
- True if the box is enclosed by this (in or along)

◆ getAnchor2D()
Get the position of a specified 2D anchor
- Parameters
-
anchor The required anchor
- Returns
- The requested anchor position

◆ getArea()
| double Box::getArea | ( | ) | const |
Get the box 2D area
- Returns
- The box 2D area
◆ getCentre()
|
inline |
Get the centre point of the box
- Returns
- The box centre point
◆ getDepth()
|
inline |
Get the box depth
- Returns
- The box depth
◆ getHeight()
|
inline |
Get the box height
- Returns
- The box height
◆ getMaxLength()
| double Box::getMaxLength | ( | ) | const |
Get the greatest length in any dimension
- Returns
- The greatest length in any dimension
◆ getVolume()
| double Box::getVolume | ( | ) | const |
Get the box volume
- Returns
- The box volume
◆ getWidth()
|
inline |
Get the box width
- Returns
- The box width
◆ isEqual2D()
Determine if two boxes are equal in 2D
- Parameters
-
ref The box to compare with this prec The required precision
- Returns
- True if the boxes are identical

◆ isEqual3D()
Determine if two boxes are equal
- Parameters
-
ref The box to compare with this prec The required precision
- Returns
- True if the boxes are identical

◆ magnify()
| void Box::magnify | ( | double | scale | ) |
Scale the box whilst maintaining a common centre
- Parameters
-
scale The ratio to scale the box by

◆ merge() [1/2]
| void Box::merge | ( | const Box & | ref | ) |
Merge the specified box into the box bounds
- Parameters
-
ref The box to merge

◆ merge() [2/2]
| void Box::merge | ( | const Point & | ref | ) |
Merge the specified point into the box bounds
- Parameters
-
ref The point to merge


◆ moveTo()
|
inline |
Move the origin to the specified location (retaining the overall bounds)
- Parameters
-
position The position to move to
◆ operator!=()
|
inline |
Inequality operator
- Parameters
-
ref The box to compare with this
- Returns
- True if the boxes are different

◆ operator*()
| Box Box::operator* | ( | double | scale | ) | const |
Multiplication operator
- Parameters
-
scale The amount to multiply the box by
- Returns
- A multiplied box

◆ operator*=()
| Box & Box::operator*= | ( | double | scale | ) |
Multiplication with assignment operator
- Parameters
-
scale The amount to multiply the box by
- Returns
- A reference to this
◆ operator+()
Addition operator
- Parameters
-
offset The amount to add to the box
- Returns
- An offset box

◆ operator+=()
Addition with assignment operator
- Parameters
-
offset The amount to add to the box
- Returns
- A reference to this
◆ operator-()
Subtraction operator
- Parameters
-
offset The amount to subtract from the box
- Returns
- An offset box

◆ operator-=()
Subtraction with assignment operator
- Parameters
-
offset The amount to subtract from the box
- Returns
- A reference to this
◆ operator/()
|
inline |
Division operator
- Parameters
-
scale The amount to divide the box bounds by
- Returns
- A multiplied box
◆ operator/=()
|
inline |
Division with assignment operator
- Parameters
-
scale The amount to divide the box bounds by
- Returns
- A reference to this
◆ operator=()
Assignment operator
- Parameters
-
source The object to copy
- Returns
- A reference to this

◆ operator==()
|
inline |
Equality operator
- Parameters
-
ref The box to compare with this
- Returns
- True if the boxes are identical

◆ overlaps2D()
Determine if the this overlaps a another box in 2D
- Parameters
-
ref The reference box prec The required precision
- Returns
- True if the box is overlapped by this (partial or total)
◆ positionOf2D()
Determine the relationship of a point to the box in 2D
- Parameters
-
ref The point to test prec The required precision
- Returns
- The relative position of the point

◆ positionOf3D()
Determine the relationship of a point to the box
- Parameters
-
ref The point to test prec The required precision
- Returns
- The relative position of the point
◆ resize()
| void Box::resize | ( | double | len | ) |
Resize the box whilst maintaining a common centre
- Parameters
-
len The amount to adjust the box bounds by

◆ rotate()
| void Box::rotate | ( | double | angle | ) |
Rotate the box (calculate a new bounding box from the rotated box)
- Parameters
-
angle The rotation angle
◆ setCentre()
|
inline |
Set the centre point of the box
- Parameters
-
centre The box centre point

◆ sort()
| void Box::sort | ( | ) |
Sort the box bounds in ascending order
The documentation for this class was generated from the following files:
- /Users/rwessel/Documents/Development/ActiveLib/Active/Geometry/Box.h
- /Users/rwessel/Documents/Development/ActiveLib/Active/Geometry/Box.cpp