Class to reorientate geometric objects to a horizontal plane. More...
#include <Leveller.h>
Public Member Functions | |
| Leveller () | |
| Leveller (const Vector3 &norm, double zAngle=0.0, double prec=math::eps) | |
| Leveller (const Leveller &source) | |
| ~Leveller () | |
| Leveller & | operator= (const Leveller &source) |
| const Vector3 & | getNormal () const |
| void | transform (Point &target) const |
| void | transform (Line &target) const |
| void | transform (Arc &target) const |
| void | transform (Polygon &target) const |
| void | setRotation (const Vector3 &norm, double zAngle=0, double prec=math::eps) |
| void | setZRotation (double angle) |
| Leveller & | reverse () |
Detailed Description
Class to reorientate geometric objects to a horizontal plane.
Constructor & Destructor Documentation
◆ Leveller() [1/3]
| Leveller::Leveller | ( | ) |
Constructor
Here is the call graph for this function:

◆ Leveller() [2/3]
Constructor
- Parameters
-
norm Normal to the plane to be levelled zAngle The required rotation about the z axis prec The required precision
Here is the call graph for this function:

◆ Leveller() [3/3]
| Leveller::Leveller | ( | const Leveller & | source | ) |
Copy constructor
- Parameters
-
source The object to copy
◆ ~Leveller()
| Leveller::~Leveller | ( | ) |
Destructor
Member Function Documentation
◆ getNormal()
|
inline |
Get the normal to the plane to be levelled
- Returns
- The normal to the plane to be levelled
◆ operator=()
Assignment operator
- Parameters
-
source The object to copy
- Returns
- A reference to this
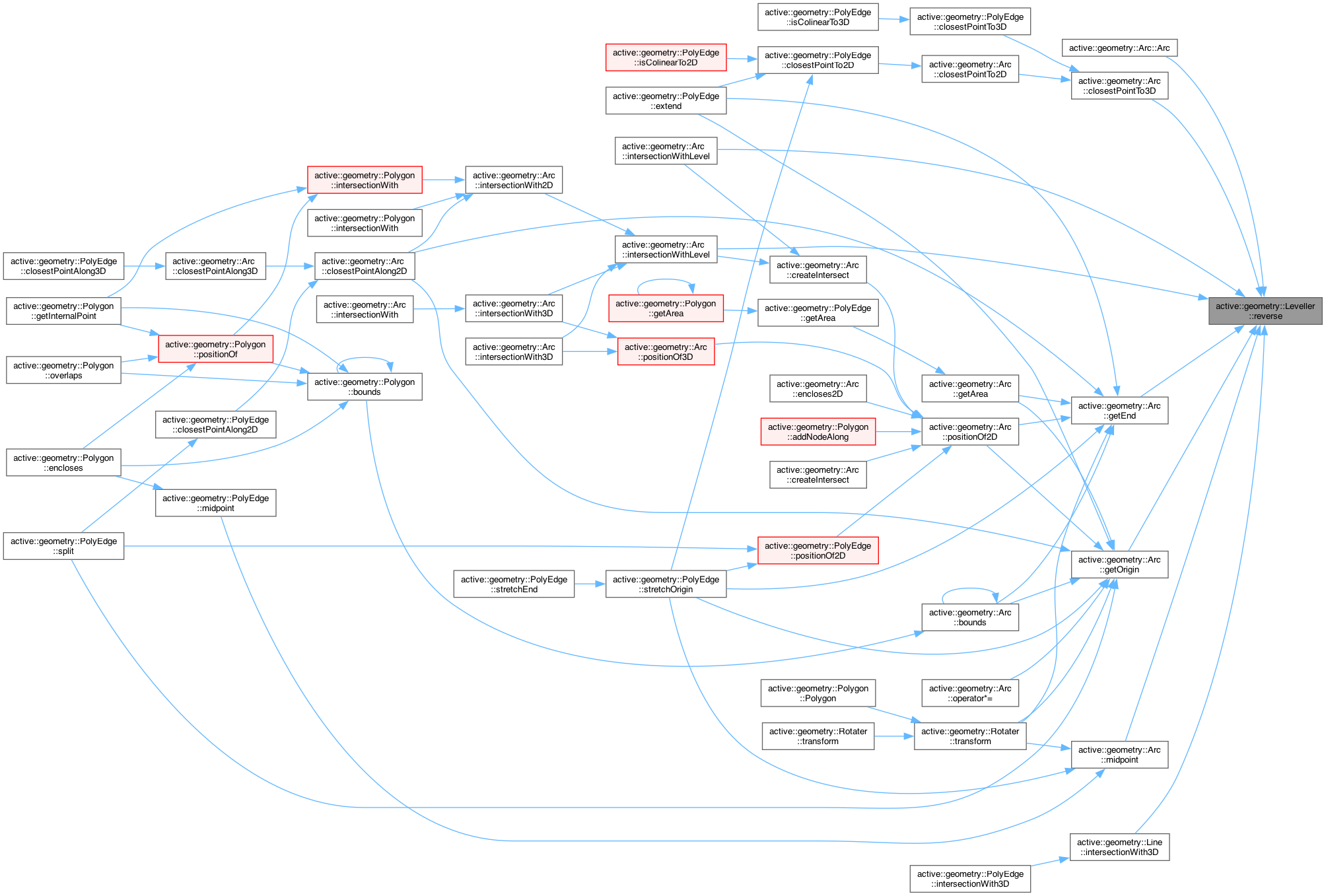
◆ reverse()
| Leveller & Leveller::reverse | ( | ) |
Reverse the order of the transformation
- Returns
- A reference to this
Here is the caller graph for this function:
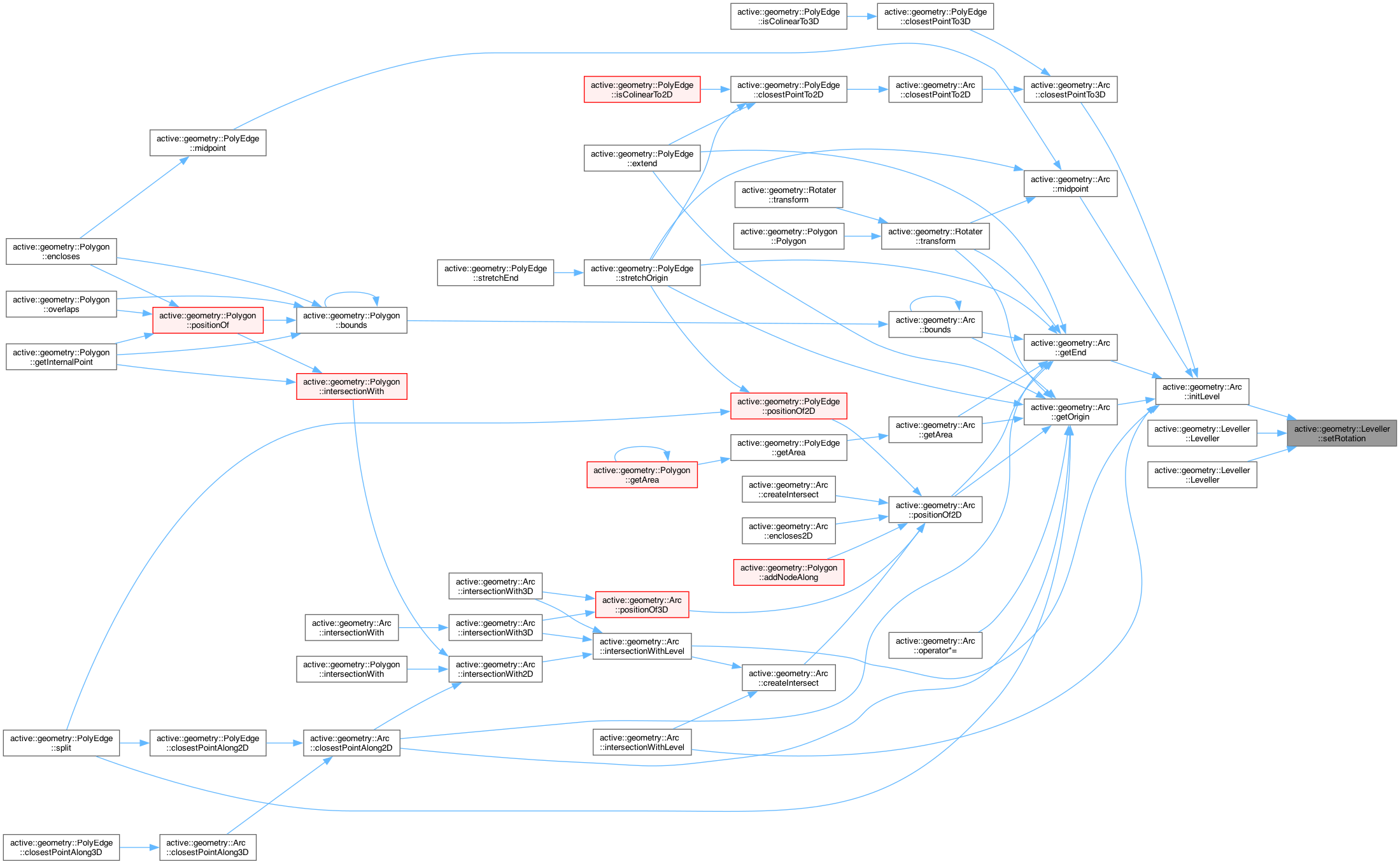
◆ setRotation()
Set the normal to the plane to be levelled
- Parameters
-
norm The normal to the plane to be levelled zAngle The required rotation about the z axis prec The required precision
Here is the caller graph for this function:
◆ setZRotation()
| void Leveller::setZRotation | ( | double | angle | ) |
Set the rotation about the z axis
- Parameters
-
angle The rotation about the z axis
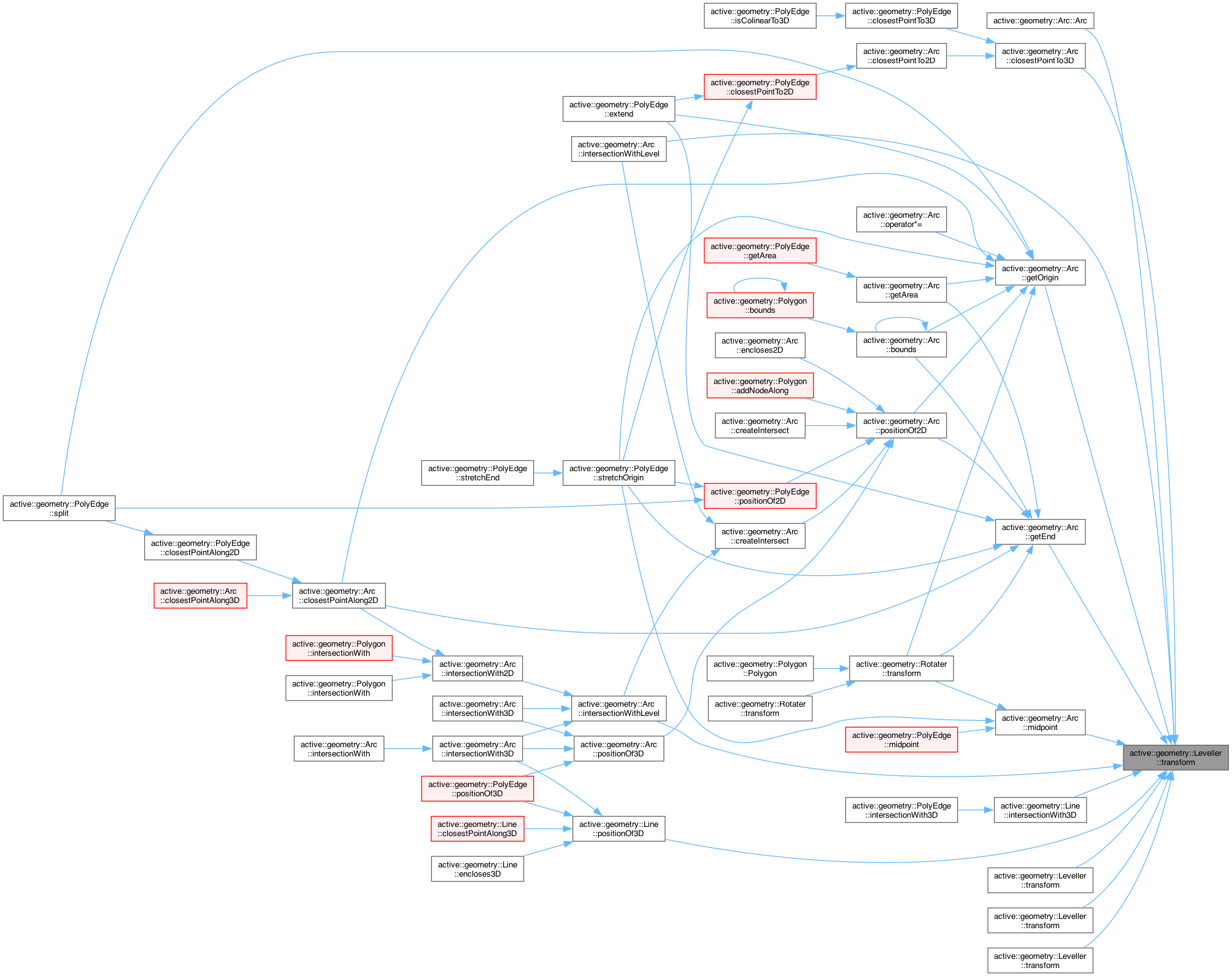
◆ transform() [1/4]
| void Leveller::transform | ( | Arc & | target | ) | const |
Transform an arc
- Parameters
-
target The arc to be transformed
Here is the call graph for this function:

◆ transform() [2/4]
| void Leveller::transform | ( | Line & | target | ) | const |
Transform a line
- Parameters
-
target The line to be transformed
Here is the call graph for this function:

◆ transform() [3/4]
| void Leveller::transform | ( | Point & | target | ) | const |
Transform a point
- Parameters
-
target The point to be transformed
Here is the caller graph for this function:
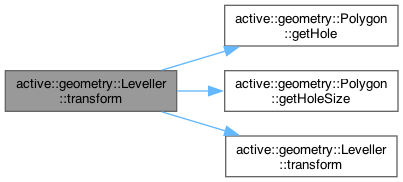
◆ transform() [4/4]
| void Leveller::transform | ( | Polygon & | target | ) | const |
Transform a polygon
- Parameters
-
target The polygon to be transformed
Here is the call graph for this function:
The documentation for this class was generated from the following files:
- /Users/rwessel/Documents/Development/ActiveLib/Active/Geometry/Leveller.h
- /Users/rwessel/Documents/Development/ActiveLib/Active/Geometry/Leveller.cpp